This is an old revision of the document!
6. Introduction into Alternating Current Technology
Up to now we had analysed DC signals (chapters 1. - 4.) and abrupt voltage changes for (dis)charging capacitors (chapter 5.). In households we use instead of a constant voltage (DC) alternating voltage (AC). This is due to at least three main facts
- Often the voltage given by the power plant is AC. This is true for example in all power plants which use electric generators. In these, an mechanic energy of a rotating system is transformed into electric energy by means of moving magnets, which induce an alternating electic voltage. Some modern plants, like photovoltaic plants do not primary generate AC voltages.
- For long-range power transfer the power losses $P_{loss}$ can be reduced by reducing the currents $I$ since $P_{loss}=R\cdot I^2$. Therefore, for constant power transfer the voltage have to be increased. This is much easier done with AC voltages: AC enables to transform lower voltages to higher by the use of alternating magnetic fields in a transformer.
- AC signals have at least one more value which can be used for understanding the situation of the source or load. This simplifies the power and load management in a complex power network.
This does not mean that DC power lines are useless or only full of disadvantages:
- A lot of modern loads need DC voltages, like battery based systems (laptops, electric cars, smartphones). Others can simpliy be changed into DC loads like systems with electric motors (refridgerators, oven, lighting, heating).
- Long-range power transfer with DC voltages show often much lower power losses.
Besides the applications in power systems AC values are also important in communication engineering. Acoustic and visual signals like sound and images can often be considered as wavelike AC signals. Additionally, also for signal transfer like Bluetooth, RFID, antenna design AC signals are important.
In order to understand these systems a bit more, we will start in this chapter with a first introduction into AC systems.
- How to calculate with complex numbers (sum, difference, product) can be seen in this video
6.1 Description of time-dependent Signals
Learning Objectives
By the end of this section, you will be able to:
- know which types of time-dependent waveforms there are and be able to assign them
- Know the relationship between amplitude and peak-to-peak value.
- Know the relationship between period, frequency and angular frequency.
- Know the difference between zero phase angle and phase shift angle.
- Know the direction of the phase shift angle.
- know the formula symbols of the above-mentioned quantities.
6.1.1 Description of Classification of time-dependent Signals
Voltages and currents in the following chapters will be time-dependent values. As already used in chapter 5. for the time-dependent values lowercase letters will be written.
By this time-dependent values any temporal form of the voltage / current curves are possible (see figure 1).
- We distinguish periodic and non periodic signals
- One important family of periodic signals are sinusoidal signals
- Sinusoidal signals can be mixed with DC signals

In the following we will investigate mainly pure AC signals.
6.1.2 Descriptive Values of AC Signals

There are some important characteristic values when investigating AC signals (figure 2). For the singal itself these are:
- The DC voltage or DC offset is given by the value $U_{DC}$ of $V_{DC}$ (in German: Gleichanteil). The DC component also defines the average value of an AC signal.
- The maximum deviation from the DC value is called peak voltage $U_p$ (in German : Spitzespannung). Specifically for sinusidal signals the peak voltage $U_p$ is also called amplitude $\hat{U}$ (in German: Scheitelwert or Amplitude).
- The voltage difference between maximum and minimum deviation is called peak-to-peak voltage $U_{pp}$ (in German: Spitze-Spitze-Spannung).
Be aware, that in English texts often amplitude is also used for (non sinusidal) $U_{pp}$ - based on German DIN standards the term amplitude is only valid for the sinusidal peak voltage.
Additionally, there are also characteristic values related to the time:
- The shortest time difference for the signal to repeat is called period $T$.
- Based on the period $T$ the frequency $f = {{1}\over{T}}$ can be derived. The unit of the frequency is $1 Hz = 1 Hertz$.
- For calculation, often the angular frequency $\omega$ is used. The angular frequency is given by $\omega = {{2\pi}\over{T}}$ with the unit ${{1}\over{s}}$.
The angular frequency represents the angle which is covered in one second. - Another handy value is the time offset between the start of the sinus wave ($u(t)=0V$ and rising) and $t=0s$. This difference is often written based on an angular difference and is called the phase angle or initial phase $\varphi_U$ (in German: Nullphasenwinkel). This then has to be calculated back to a time value: $\Delta t= {{\varphi_U}\over{\omega}}= \varphi_U\cdot{{T}\over{2\pi}}$
Mathematically, the AC voltages and currents can be written as:
$$u(t)=\hat{U}\cdot sin(\omega t + \varphi_U)$$
$$i(t)=\hat{I}\cdot sin(\omega t + \varphi_I)$$
Between the AC voltages and currents there is also another important characteristic: The phase difference $\Delta \varphi$ is given by $\Delta \varphi = \varphi_U - \varphi_I$. The phase difference shows how far the momentary value of the current is ahead of the momentary value of the voltage.
Notice:
The initial phase $\varphi_0$ has an direction / sign which have to be considered. In the case a) in the picture the zero-crossing of the sinusidal signal is before $t=0$ or $\omega t =0$. Therefore, the initial phase $\varphi_0$ is positive.

Similarly also for the phase difference $\Delta \varphi$ the direction has to be taken into account. In the following image the zero-crossing of the voltage curve is before the zero-crossing of the current. This leads to a positive phase difference $\Delta \varphi$.

6.2 Averaging of AC Signals
Learning Objectives
By the end of this section, you will be able to:
- calculate the arithmetic mean, the rectified value and the rms value.
- know these mean values for sinusoidal quantities.
- know the reason for using the rms value.
In order to analyse AC signals more, often different types of averages are taken into account. The most important values are:
- the arithmetic mean $\overline{X}$
- the recified value $\overline{|X|}$
- the rms value $X$
These shall be discussed in the following. The video “Alternating Current AC Basics - Part 1” of EEVblog explains the ideas behind these values alternatively to the following subchapter:
6.2.1 The Arithmetic Mean
The arithmetic mean is given by the (equally weighted) averaging of the signed measuring points.
For finite values the arithmetic mean is given by:
$$\overline{X}={{1}\over{n}}\cdot \sum_{i=1}^n x_i$$
For functions it is given by: $$\boxed{\overline{X}={{1}\over{T}}\cdot \int_{t=t_0}^{t_0 + T} x(t) dt}$$
For pure AC signals, the arithmetic mean $\overline{X}=0$, since the unsigned value of the integral between upper half-wave and $0$ is equal to the unsigned value of the integral between lower half-wave and $0$.
6.2.2 The Rectified Value
Since the arithmetic mean of pure AC signals with $\overline{X}=0$ does not really give an insight into the signal, different other (weighted) average can be used.
One of them is the rectified value. For this the signal is first recified (visually: negaive values are folded up onto the x-axis) and then averaged.
For finite values the rectified value is given by:
$$\overline{|X|}={{1}\over{n}}\cdot \sum_{i=1}^n |x_i|$$
For functions it is given by: $$\boxed{\overline{|X|}={{1}\over{T}}\cdot \int_{t=t_0}^{t_0 + T} |x(t)| dt}$$
\begin{align*} \overline{|X|} &= {{1}\over{T}}\cdot \int_{t=t_0}^{t_0 + T} |\hat{X}\cdot sin(\omega t + \varphi) | dt \\ \end{align*}
Without limiting the generality, we use $\varphi=0$ and $t_0 = 0$ \begin{align*} \overline{|X|} &= {{1}\over{T}}\cdot \int_{t=0 }^{T } |\hat{X}\cdot sin(\omega t ) | dt \\ \end{align*}
Since $sin(\omega t)\geq0$ for $t\in [0,\pi]$, the integral can changed and the absolute value bars can be excluded like the following
\begin{align*}
\overline{|X|} &= {{1}\over{T}}\cdot 2 \cdot \int_{t=0}^{T/2} \hat{X}\cdot sin( {{2\pi}\over{T}} t ) dt \\
&= 2 \cdot {{1}\over{T}}\cdot [-\hat{X}\cdot {{T}\over{2\pi}}\cdot cos( {{2\pi}\over{T}} t )]_{t=0}^{T/2} \\
&= 2 \cdot {{1}\over{T}}\cdot {{T}\over{2\pi}}\cdot \hat{X}\cdot [-cos( {{2\pi}\over{T}} t )]_{t=0}^{T/2} \\
&= {{1}\over{\pi}}\cdot \hat{X} \cdot [1+1] \\
\boxed{\overline{|X|} = {{2}\over{\pi}}\cdot \hat{X} \approx 0.6366\cdot \hat{X}}\\
\end{align*}
Exercise 6.3.1 The Rectified Value of rectangular and triangular signals
Calculate the rectified value of rectangular and triangular signals! Use similar symmetry simplificatinos like shown for AC signals. Compare it to the values shown in figure 3.
6.2.3 The RMS Value
Often it is important be able to compare AC signals to DC signals by having equivalent values. But what does equivalent mean?
Most importantly, these “equivalent values” are used to compare the output power of a system. One of this equivalent value is supply voltage value of $230V$ (or in some countries $110V$).
How do we come to this values?
We want to find the voltage $U_{DC}$ and $I_{DC}$ of a DC source, that the output power $P_{DC}$ on a resistor $R$ is similar to the output power $P_{AC}$ of an AC source with the instantaneous values $u(t)$ and $i(t)$. For this, we have to consider the instantaneous power $p(t)$ for a distinct time $t$ and integrate this over one period $T$.
\begin{align*} P_{DC} &= P_{AC} \\ U_{DC} \cdot I_{DC} &= {{1}\over{T}} \int_{0}^{T} u(t) \cdot i(t) dt \\ R \cdot I_{DC}^2 &= {{1}\over{T}} \int_{0}^{T} R \cdot i^2(t) dt \\ I_{DC}^2 &= {{1}\over{T}} \int_{0}^{T} i^2(t) dt \\ \rightarrow I_{DC} &= \sqrt{{{1}\over{T}} \int_{0}^{T} i^2(t) dt} \end{align*}
The similar approach can be used on instantaneous voltage $u(t)$. Generally, the RMS value of $X$ is given by
\begin{align*}
\boxed{X_{RMS} = \sqrt{{{1}\over{T}} \int_{0}^{T} x^2(t) dt}}
\end{align*}
What is the meaning of RMS? Simple:

By this abbreviation, one can also not forget in which order the fromula cas to be written… Often the rms value is also called effective value (in German: Effektivwert).
Note:
- The heat dissipation on an resistor $R$ of an AC current with the rms value of $I_{rms}=1A$ is equal to the heat dissipation of an DC current with $I_{DC}=1A$.
- To shorten writing formulas, the values of AC signals given with uppercase letters will represent the RMS value in the following: $U = U_{RMS}$, $I = I_{RMS}$.
- It holds for AC signals ant their RMS values:
- The resistance is $R={{U}\over{I}}$
- The power dissipation on a resistor is $P=U\cdot I$
\begin{align*} X &= \sqrt{{{1}\over{T}}\cdot \int_{t=t_0}^{t_0 + T} x^2(t) dt} \\ &= \sqrt{{{1}\over{T}}\cdot \int_{t=0} ^{T} \hat{X}^2\cdot sin^2(\omega t) dt} \\ &= \sqrt{{{1}\over{T}}\cdot \int_{t=0} ^{T} \hat{X}^2\cdot {{1}\over{2}}\cdot (1- cos(2\cdot \omega t)) dt} \\ &= \sqrt{{{1}\over{T}}\cdot \hat{X}^2\cdot {{1}\over{2}}\cdot [t + {{1}\over{2\omega }}\cdot sin(2\cdot \omega t)]_{0}^{T}} \\ &= \sqrt{{{1}\over{T}}\cdot \hat{X}^2\cdot {{1}\over{2}}\cdot (T - 0 + 0 - 0)} \\ &= \sqrt{{{1}\over{2}}\cdot \hat{X}^2} \\ \boxed{X = {{1}\over{\sqrt{2}}}\cdot \hat{X} \approx 0.707\cdot \hat{X}}\\ \end{align*}
This can also be seen in this youtube video.
Note:
In the following chapters, we will often use for a physical value $x(t)$ a dependency on $\sqrt{2}X$ instead of $\hat{X}$. Therefore, the sinusidal formula of a physical value $x$ will be : $x(t)=\hat{X}\cdot sin(\omega t + \varphi_x) \rightarrow x(t)=\sqrt{2}{X}\cdot sin(\omega t + \varphi_x) $Exercise 6.3.2 The RMS Value of rectangular and triangular signals
Calculate the RMS value of rectangular and triangular signals! Use similar symmetry simplificatinos like shown for AC signals. Compare it to the values shown in figure 3.
6.2.4 Comparison of the different Averages
The following simulation shows the different values for averaging a rectangular, a sinosoidal, and a triangluar waveform.
Be aware that one has to wait for ont full period in order to see the resulting values on the right outputs of the average generating blocks.
6.3 AC Two-Terminal Networks
Learning Objectives
By the end of this section, you will be able to:
- know that real, lossy components are described by equivalent circuits of ideal components.
- know and be able to apply the definition of apparent resistance, apparent conductance, impedance, and admittance.
In the chapters 2. Simple Circuits and 3 Non-ideal Sources and Two-terminal Networks we already have seen, that it is possible to reduce complex circuitries down to equivalent resistors (and ideal sources). This we will try to adopt for AC components, too.
We want to analyze how relationship between the current through a component and the voltage drow on this component behaves, when an AC current is applied.
6.3.1 Resistance
We start with Ohms law, which states, that the instantaneous voltage $u(t)$ is proportional to the instantaneous current $i(t)$ by the factor $R$. $$u(t) = R \cdot i(t)$$
Then we insert the functions representing the instantaneous signals: $x(t)= \sqrt{2}{X}\cdot sin(\omega t + \varphi_x)$: $$\sqrt{2}{U}\cdot sin(\omega t + \varphi_u) = R \cdot \sqrt{2}{I}\cdot sin(\omega t + \varphi_i)$$
Since we know, that $u(t)$ must be proportional to $i(t)$ we conclude that for a resistor $\varphi_u=\varphi_i$!
\begin{align*} R &= {{\sqrt{2}{U}\cdot sin(\omega t + \varphi_i)}\over{\sqrt{2}{I}\cdot sin(\omega t + \varphi_i) }} \\ &= {{U}\over{I}} \end{align*}

This was not too hard und quite obvious. But, what about the other types of passive two-terminal networks - namely the capacitance and inductance?
6.3.2 Capacitance
For the capacitance we have the basis formula: $$C={{Q}\over{U}}$$ This formula ia also true for the instantaneous values: $$C={{q(t)}\over{u(t)}}$$ Additionally we know, that the instantaneous current is defined by $i(t)={{dq(t)}\over{dt}}$.
By this we can set up the formula: \begin{align*} i(t) &= {{dq(t)}\over{dt}} \\ &= {{d}\over{dt}}\left( C \cdot u(t) \right) \end{align*}
Now, we insert the functions representing the instantaneous signals and calculate the derivative: \begin{align*} \sqrt{2}{I}\cdot sin(\omega t + \varphi_i) &= {{d}\over{dt}}\left( C \cdot \sqrt{2}{U}\cdot sin(\omega t + \varphi_u) \right) \\ &= C \cdot \sqrt{2}{U}\cdot \omega \cdot cos(\omega t + \varphi_u) \\ \\ {I}\cdot sin(\omega t + \varphi_i) &= C \cdot {U}\cdot \omega \cdot sin(\omega t + \varphi_u + {{1}\over{2}}\pi) \tag{6.3.1} \end{align*}
Equating coefficients in $(6.3.1)$ leads to: \begin{align*} I &= C \cdot U \cdot \omega \\ {{U}\over{I}} &= {{1}\over{\omega \cdot C}} \end{align*} and: \begin{align*} \omega t + \varphi_i &= \omega t + \varphi_u + {{1}\over{2}}\pi \\ \varphi_i &= \varphi_u + {{1}\over{2}}\pi \\ \varphi_u -\varphi_i &= - {{1}\over{2}}\pi \end{align*}
The phase shift of $- {{1}\over{2}}\pi$ can also be seen in figure 6 and figure 5.
Notice:
In order not to mix up the definitions, for AC signals the fraction of rms voltage by rms current is called (apparent) impedance $Z$ (in German: Scheinwiderstand or Impedanz).The impedance is generally defined as $$Z = {{U}\over{I}}$$
Only for pure resistor as a two-terminal network the impedance $Z_R$ is equal to the value of the resistance: $Z_R=R$.
For the pure capacitive as a two-terminal network the impedance $Z_C$ is $Z_C={{1}\over{\omega \cdot C}}$.

6.3.3 Inductance
The inductance will here be introduced shortly - the detailed introduction is part of electrical engineering 2.
For the capacitance $C$ we had the situation, that it reacts to a voltage change ${{d}\over{dt}}u(t)$ with a counteracting current:
$$i(t)= C \cdot {{d}\over{dt}}u(t)$$
This is due to the fact, that the capacity stores charge carriers $q$. It appears that “the capacitance does not like voltage changes and reacts with a compensating current”. When the voltage on a capacity drops, the capacity supplies a current - when the voltage rises the capacity drains a current.
For an inductance $L$ it is just the other way around: “the inductance does not like current changes and reacts with a compensating voltage drop”. Once the current changes the inductance will create a voltage drop that counteracts and continues the current: A current change ${{d}\over{dt}}i(t)$ leads to a voltage drop $u(t)$: $$u(t)= L \cdot {{d}\over{dt}}i(t)$$ The proportionality factor here is $L$, the value of the inductance, and it is measured in $[L] = 1H = 1\; Henry$.
We can now again insert the functions representing the instantaneous signals and calculate the derivative: \begin{align*} \sqrt{2}{U}\cdot sin(\omega t + \varphi_u) &= L \cdot {{d}\over{dt}}\left( \sqrt{2}{I}\cdot sin(\omega t + \varphi_i) \right) \\ &= L \cdot \sqrt{2}{I}\cdot \omega \cdot cos(\omega t + \varphi_i) \\ \\ {U}\cdot sin(\omega t + \varphi_u) &= L \cdot {I}\cdot \omega \cdot sin(\omega t + \varphi_i + {{1}\over{2}}\pi) \tag{6.3.2} \end{align*}
Equating coefficients in $(6.3.2)$ leads to: \begin{align*} U &= L \cdot {I}\cdot \omega \\ \boxed{Z_L = {{U}\over{I}} = \omega \cdot L} \end{align*} and: \begin{align*} \omega t + \varphi_u &= \omega t + \varphi_i + {{1}\over{2}}\pi \\ \varphi_u &= \varphi_i + {{1}\over{2}}\pi \\ \boxed{\varphi = \varphi_u -\varphi_i = + {{1}\over{2}}\pi } \end{align*}
The phase shift of $+ {{1}\over{2}}\pi$ can also be seen in figure 8 and figure 7.

Notice:
Remember the formulas for the different pure loads:One way to memorize the phase shift is given bei the word CIVIL:
- CIVIL: for a capacitance C the current I leads the voltage V.
Therefore the phase angle $\varphi_I$ of the current is larger than the phase angle $\varphi_U$ of the voltage: $\rightarrow \varphi = \varphi_U - \varphi_I < 0 $. - CIVIL: for an inductance L the voltage V leads the current I.
Therefore the phase angle $\varphi_U$ of the voltge is larger than the phase angle $\varphi_I$ of the current: $\rightarrow \varphi = \varphi_U - \varphi_I > 0 $.
For the concept of AC two-terminal networks, we are also able to use the DC methods of network analysis in order to solve AC networks.
6.4 Complex Values in Electical Engineering
Learning Objectives
By the end of this section, you will be able to:
- know how sine variables can be symbolized by a vector.
- know which parameters can determine a sinusoidal quantity.
- graphically derive a pointer diagram for several existing sine variables.
- plot the phase shift on the vector and time plots.
- add sinusoidal quantities in vector and time representation.
- know and apply the impedance of components.
- know the frequency dependence of the impedance of the components. In particular, you should know the effect of the ideal components at very high and very low frequencies and be able to apply it for plausibility checks.
The following two videos explain the basic terms of the complex AC calculus: Impedance, Reactance, Resistance
6.4.1 Representation and Interpretation
Up to now, we used for the AC signals the formula $x(t)= \sqrt{2} X \cdot sin (\omega t + \varphi_x)$ - which was quite obvious.
However, there is an alternative way to look onto the alternating sinusidal signals. For this, we look first on a different, but already familiar problem (see figure 9).
- A mechanical, linear spring with the characteristic constant $D$ is displaced due a mass $m$ in the Earth's gravitational field. The deflection only based on the gravitational field is $X_0$.
- At the time $t_0=0$ , we deflect this spring a bit more to $X_0 + x(t_0)=X_0 + \hat{X}$ and therefore induce energy into the system.
- When the mass is released, the mass will spring up and down for $t>0$. The signal can be shown as shadow when the mass is illuminated sideways.
For $t>0$, the energy is continuously shifted between poential energy (deflection $x(t)$ around $X_0$) and kinetic energy (${{d}\over{dt}}x(t)$) - When looking onto the course of time of $x(t)$, the signal will behave as: $x(t)= \hat{X} \cdot sin (\omega t + \varphi_x)$
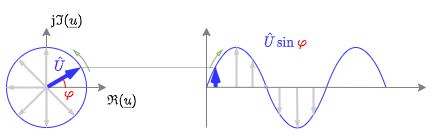
- The movement of the shadow can also be created by a the sideways shadow of a stick on a rotating disc.
This means, that a two dimensional rotation is reduced down to a single dimension.

The transformation of the two dimensional rotation to a one dimensional sinusidal signal is also shown in figure 10.
The two dimensional rotation can be represented with a complex number in Euler's formula. It combines the exponential representation with real part $\Re$ and imaginary part $\Im$ of a complex value: $$ \underline{x}(t)=\hat{X}\cdot e^{j(\omega t + \varphi_x)} = \Re(\underline{x}) + j\cdot \Im(\underline{x})$$
For the imaginary unit $i$ the letter $j$ is used in electical engineering, since the letter $i$ is already taken for currents.

6.4.2 Complex Current and Voltage
The concepts of complex numbers shall now be applied to voltages and currents. Up to now we used the following formula to represent alternating voltages:
$$u(t)= \sqrt{2} \hat{U} \cdot sin (\varphi)$$
This is now interpreted as the instantaneuos value of a complex vector $\underline{u}(t)$, which rotates given by the time dependent angle $\varphi = \omega t + \varphi_u$.
The parts on the complex plane are then given by:
- The real part $\Re{(\underline{u}(t))} = \sqrt{2}U \cdot cos (\omega t + \varphi_u)$
- The imaginary part $\Im{(\underline{u}(t))} = \sqrt{2}U \cdot sin (\omega t + \varphi_u)$
This is equivalent to the complex phasor $\underline{u}(t)=\sqrt{2}U \cdot e ^{j (\omega t + \varphi_u)}$
The complex phasor can be separated: \begin{align*} \underline{u}(t) &=\sqrt{2}U \cdot e ^{j (\omega t + \varphi_u)} \\ &=\sqrt{2}\color{blue}{U \cdot e ^{j \varphi_u}} \cdot e ^{j \omega t } \\ &=\sqrt{2}\color{blue}{\underline{U}} \cdot e ^{j \omega t} \\ \end{align*}
The fixed phasor (in German: komplexer Festzeiger) of the voltage is given by $\color{blue}{\underline{U}}= \color{blue}{U \cdot e ^{j \varphi_u}} $
Generally, from now on not only the voltage will be considered as a phasor, but also the current $\underline{I}$ and derived quantities like the impedance $\underline{X}$.
Therefore, the from Mathematics 101 known properties of complex numbers can be applied:
- A multiplication with $j$ equals a phase shift of $+90°$
- A multiplication with $-j$ equals a phase shift of $-90°$
6.5 Complex Impedance
Learning Objectives
By the end of this section, you will be able to:
- draw and read pointer diagrams.
- know and apply the complex value formulas of impedance, reactance, resistance.
6.5.1 Introduction into Complex Impedance
The complex impedance is “nearly” similar calculated like the resistance. In the subchapters before, that impedance $Z$ was calculated by $Z=\frac{U}{I}$.
Now the complex impedance is:
\begin{align*} \underline{Z}&=\frac{\underline{U}}{\underline{I}} \\ &= \Re{(\underline{Z})} + j \cdot \Im{(\underline{Z})} \\ &= R + j \cdot X \\ &= Z \cdot e^{j \varphi} \\ &= Z \cdot (cos \varphi + j \cdot sin \varphi ) \end{align*}
With
- the resistance $R$ (in German: Widerstand) as the pure real part
- the reactance $X$ (in German: Blindwiderstand) as the pure imaginary part
- the impedance $Z$ (in German: Scheinwiderstand) as the complex number given by the complex addition of resistance and the reactance as a complex number
The impedance can be transformed from cartesian to polar by:
- $Z=\sqrt{R^2 + X^2}$
- $\varphi = arctan \frac{X}{R} $
The other way around it is possible to transform by:
- $R = Z cos \varphi$
- $X = Z sin \varphi$
6.5.2 Application on pure Loads
With the complex impedance in mind, the table 1 can be expanded to:
| Load $\phantom{U\over I}$ | integral representation $\phantom{U\over I}$ | complex impedance $\underline{Z}={{\underline{U}}\over{\underline{I}}}$ | impedance $Z \phantom{U\over I}$ | phase $\varphi \phantom{U\over I}$ | |
|---|---|---|---|---|---|
| Resistance | $R\phantom{U\over I}$ | ${u} = R \cdot {i}$ | $Z_R = R $ | $Z_R = R $ | $\varphi_R = 0$ |
| Capacitance | $C$ | ${u} ={{1}\over{C}}\cdot \int {i} dt$ | $Z_C = {{1}\over{j\omega \cdot C}} = {{-j}\over{\omega \cdot C}}$ | $Z_C = {{1}\over{\omega \cdot C}}$ | $\varphi_C = -{{1}\over{2}}\pi \hat{=} -90°$ |
| Inductance | $L$ | ${u} = L \cdot {{d}\over{dt}} {i}$ | $Z_L = j \omega \cdot L $ | $Z_L = \omega \cdot L $ | $\varphi_L = +{{1}\over{2}}\pi \hat{=} +90°$ |
The relationship between $j$ and integral calculus should be clear:
- The derivative of a sinusidal value - and therefore a phasor - can simply be written as “$\cdot j$”, which also means a phase shift of $+90°$:
${{d}\over{dt}} e^{j(\omega t + \varphi_x)} = j \cdot e^{j(\omega t + \varphi_x)}$ - The integral of a sinusidal value - and therefore a phasor - can simply be written as “$\cdot (-j)$”, which also means a phase shift of $-90°$.1)
$\int e^{j(\omega t + \varphi_x)} = {{1}\over{j}} \cdot e^{j(\omega t + \varphi_x)} = - j \cdot e^{j(\omega t + \varphi_x)}$
Once a fixed input voltage is given, the voltage phasor $\underline{U}$, the current phasor $\underline{I}$, and the impedance phasor $\underline{Z}$. In figure 13 these phasors are shown.

6.5.3 Application on Impedance Networks
Simple Networks
In the capter Kirchhoff's Circuit Laws we already had a look onto simple networks like a series or parallel circuit of resistors.
These formulas not only apply for ohmic resistors but also for impedances:

Similarly, the voltage divider, the current divider, the star-delta-transformation, the Thevenin and Northon Theorem can be used, by substituting resistances with impedances. This means for example, every linear source can be represented by an output impedance $\underline{Z}_o$ and a ideal voltage source $\underline{U}$.
More "complex" Networks
For more complex problems having AC values in circuitries the following approach is beneficial.
This concept will be used in the next chapter and in circuit design.

Notice:
For a complex number are always two values are needed. These are either
- the real part (e.g. the resistance) and the imaginary part (e.g. the reactance), or
- the absolute value (e.g. the absolute value of the impedance) and the phase
Therefore, instead of the form $\underline{Z}=Z\cdot e^{j\varphi}$ for the phasors often the form $Z\angle{\varphi}$ is used.
Exercises
Exercise 6.3.1 Impedance of single Components I
A coil has a reactance of $80\Omega$ at a frequency of $500Hz$. At which frequencies the impedance will have the following values?
- $85 \Omega$
- $120 \Omega$
- $44 \Omega$
Exercise 6.3.2 Impedance of single Components II
A capacitor with $5 \mu F$ is connected to a voltage source which generates $U_\sim = 200 V$. At which frequencies the following current can be measured?
- $0.5 A$
- $0.8 A$
- $1.3 A$
Exercise 6.3.3 Impedance of single Components III
A capacitor shall have a capacity of $4.7 \mu F \pm 10\%$. This capacitor shall be used with a AC voltage of $400V$ and $50Hz$. What is the possible current range which could be found on this component?
Exercise 6.5.1 Two voltage sources
Two ideal AC voltage sources $1$ and $2$ shall generate the RMS voltage drops $U_1 = 100V$ and $U_2 = 120V$. The phase shift between the two sources shall be $+60°$. The phase of source $1$ shall be $\varphi_1=0°$. The two sources shall be located in series.
- Draw the phasor diagram for the two voltage phasors and the resulting phasor.
- Calculate the resulting voltage and phase.
- Is the resulting voltage the RMS value or the amplitude?
The source $2$ shall now be turned around (the previous plus pole is now the minus pole and vice versa).
- Draw the phasor diagram for the two voltage phasors and the resulting phasor for the new circuit.
- Calculate the resulting voltage and phase.
Exercise 6.5.2 oscilloscope plot
The following plot is visible on an oscilloscope (= plot tool for voltages and current).

- What is the RMS value of the current an the voltage? What is the frequency $f$ and the phase $\varphi$? Does the component unter test behave ohmic, capacitic or inductive?
- How would the equivalent circuit look like, when it is build by two series components?
- Calculate the equivalent component values ($R$, $C$ or $L$) of the series circuit.
- How would the equivalent circuit look like, when it is build by two parallel components?
- Calculate the equivalent component values ($R$, $C$ or $L$) of the parallel circuit.
Exercise 6.5.3 Series Circuit
The following ciruit shall be given.

in the following some of the numbers are given. Calculate the RMS value of the missing voltage and the phase shift $\varphi$ between $U$ and $I$.
- $U_R = 10V$, $U_L = 10 V$, $U_C = 20V$, $U=?$
- $U_R = ?$, $U_L = 150 V$, $U_C = 110V$, $U=50V$
Exercise 6.5.4 Parallel Circuit
The following ciruit shall be given.

in the following some of the numbers are given. Calculate the RMS value of the missing voltage and the phase shift $\varphi$ between $U$ and $I$.
- $I_R = 3A$, $I_L = 1A$, $I_C = 5A$, $I=?$
- $I_R = ?$, $I_L = 1.2A$, $I_C = 0.4A$, $I=1A$
Exercise 6.5.5 Complex Calculation I
The following two currents with similar frequency, but different phase have to be added. Use complex calulation!
- $i_1(t) = \sqrt{2} \cdot 2 A \cdot cos (\omega t + 20°)$
- $i_2(t) = \sqrt{2} \cdot 5 A \cdot cos (\omega t + 110°)$
Exercise 6.5.6 Complex Calculation II
Two complex impedances $\underline{Z}_1$ and $\underline{Z}_2$ are invesigated. The resulting impedance for a series circuit is $60\Omega$. The resulting impedance for a prallel circuit is $25\Omega$.
What are the values for $\underline{Z}_1$ and $\underline{Z}_2$?
Exercise 6.5.7 real Coils I
A real coil has both ohmic and inductance behavior. At DC voltage the resistance is measured as $9 \Omega$. With an AC voltage of $5V$ at $50Hz$ a current of $0.5A$ is measured.
What is the value of the inductance $L$?
Exercise 6.5.8 real Coils II
A real coil has both ohmic and inductance behavior. This coil has at $100Hz$ a impedance of $1.5k\Omega$ and a resistance $1k\Omega$.
What is the value of the reactance and inductance?
Exercise 6.5.9 Capacitors and Resistance I
An ideal capacitor is in series with a resistor $R=1k\Omega$. The capacitor shows a similar voltage drop like the resistor for $100Hz$.
What is the value of the capacitance?
Exercise 6.6.1 Impedance in Series Circuit of multiple Components I
Exercise 6.6.2 Impedance in Series Circuit of multiple Components II
Exercise 6.6.3 Impedance in Parallel Circuit of multiple Components I
Exercise 6.6.4 Impedance in Mixed Parallel and Series Circuit of multiple Components I
Exercise 6.6.5 Impedance in Mixed Parallel and Series Circuit of multiple Components II
Exercise 6.6.6 Impedance in Mixed Parallel and Series Circuit of multiple Components III