4 Time-dependent magnetic Field
Learning Objectives
By the end of this section, you will be able to:
- determine the magnetic flux through a surface, knowing the strength of the magnetic field, the surface area, and the angle between the normal to the surface and the magnetic field
- use Faraday’s law to determine the magnitude of induced potential difference in a closed loop due to changing magnetic flux through the loop
- use Lenz’s law to determine the direction of induced potential difference whenever a magnetic flux changes
- use Faraday’s law with Lenz’s law to determine the induced potential difference in a coil and a solenoid
We have been considering electric fields created by fixed charge distributions and magnetic fields produced by constant currents, but electromagnetic phenomena are not restricted to these stationary situations. Most of the interesting applications of electromagnetism are, in fact, time-dependent. To investigate some of these applications, we now remove the time-independent assumption we have been making and allow the fields to vary with time. In this and the next several chapters, you will see a wonderful symmetry in the behavior exhibited by time-varying electric and magnetic fields. Mathematically, this symmetry is expressed by an additional term in Ampère’s law and by another key equation of electromagnetism called Faraday’s law. We also discuss how moving a wire through a magnetic field produces a potential difference.
Lastly, we describe applications of these principles, such as the card reader shown in figure 1. The black strip found on the back of credit cards and driver’s licenses is a very thin layer of magnetic material with information stored on it. Reading and writing the information on the credit card is done with a swiping motion. The physical reason why this is necessary is called electromagnetic induction and is discussed in this chapter.

4.1 Recap of magnetic Field
The first productive experiments concerning the effects of time-varying magnetic fields were performed by Michael Faraday in 1831. One of his early experiments is represented in the simulation in figure 2 - in the tab Pickup Coil. A potential difference is induced when the magnetic field in the coil is changed by pushing a bar magnet into or out of the coil. This potential difference can generate a current when the circuit is closed. Potential differences of opposite signs are produced by motion in opposite directions, and the directions of potential differences are also reversed by reversing poles. The same results are produced if the coil is moved rather than the magnet — it is the relative motion that is important. The faster the motion, the greater the potential difference, and there is no potential difference when the magnet is stationary relative to the coil.
Faraday also discovered that a similar effect can be produced using two circuits: a changing current in one circuit induces a current in a second, nearby circuit. An example of this can be shown in the simulation in the tab Transformer. When the source is changed into AC and the coils are moved nearer together, the light bulb of the second circuit momentarily lights up, indicating that a short-lived current surge has been induced in that circuit.
Faraday realized that in both experiments, a current flowed in the “receiving” circuit when the magnetic field in the region occupied by that circuit was changing. As the magnet was moved, the strength of its magnetic field at the loop changed; and when the current in the AC circuit changed periodically, the strength of its magnetic field at circuit 2 changed. Faraday was eventually able to interpret these and all other experiments involving magnetic fields that vary with time in terms of the following law:
Notice:
Faraday's LawAny change in the magnetic field or change in the orientation of the area of a coil with respect to the magnetic field induces an electric voltage. The induced potential difference is the negative change of the so-called magnetic flux $\Phi_{\rm m}$ per unit of time.
The magnetic flux is a measurement of the amount of magnetic field lines through a given surface area, as seen in figure 3. The magnetic flux is the amount of magnetic field lines cutting through a surface area defined by the surface vector $\vec{A}$. If the angle between the $\vec{A} = A\cdot \vec{n}$ and magnetic field vector $\vec{B}$ is parallel or antiparallel, as shown in the diagram, the absolute value of the magnetic flux is the highest possible value given the values of the area and the magnetic field.

This definition leads to a magnetic flux similar to the electric flux studied earlier:
\begin{align*} \Phi_{\rm m} = \iint_A \vec{B} \cdot {\rm d} \vec{A} \end{align*}
Therefore, the induced potential difference generated by a conductor or coil moving in a magnetic field is
\begin{align*} \boxed{ u_{\rm ind} = -{{{\rm d} \Phi_{\rm m}}\over{{\rm d}t}} = -{{\rm d}\over{{\rm d}t}}\iint_A \vec{B} \cdot {\rm d} \vec{A} } \end{align*}
The negative sign describes the direction in which the induced potential difference drives current around a circuit. However, that direction is most easily determined with a rule known as Lenz’s law, which we will discuss in the next subchapter.
figure 4 depicts a circuit and an arbitrary surface $S$ that it bounds. Notice that $S$ is an open surface: The planar area bounded by the circuit is not part of the surface, so it is not fully enclosing a volume.
Since the magnetic field is a source-free vortex field, the flux over a closed area is always zero: $\Phi_{\rm m} = {\rlap{\Large \rlap{\int} \int} \, \LARGE \circ}_{A} \vec{B} \cdot {\rm d} \vec{A} = 0$.
By this, it can be shown that any open surface bounded by the circuit in question can be used to evaluate $\Phi_{\rm m}$ (similar to the Gauss's law for current density).
For example, $\Phi_{\rm m}$ is the same for the various surfaces $S$, $S_1$, $S_2$ of the figure.

The SI unit for magnetic flux is the $\rm Weber$ (Wb), \begin{align*} [\Phi_{\rm m}] = [B] \cdot [A] = 1 ~\rm T \cdot m^2 = 1 ~ Wb \end{align*}
Based on this definition, the magnetic field unit is occasionally expressed as Weber per square meter ($\rm Wb/m^2$) instead of teslas. In many practical applications, the circuit of interest consists of a number $N$ of tightly wound turns (similar to figure 5). Each turn experiences the same magnetic flux $\Phi_{\rm m}$. Therefore, the net magnetic flux through the circuits is $N$ times the flux through one turn, and Faraday’s law is written as
\begin{align*} u_{\rm ind} = - { {\rm d} \over{{\rm d}t}} (N \cdot \Phi_{\rm m}) = -N \cdot {{{\rm d} \Phi_{\rm m}}\over{{\rm d}t}} \end{align*}
Exercise 4.1.1 Magnetic Field Strength around a horizontal straight Conductor
The square coil of figure 5 has sides $l=0.25~\rm m$ long and is tightly wound with $N=200$ turns of wire. The resistance of the coil is $R=5.0~\Omega$. The coil is placed in a spatially uniform magnetic field. The field is directed perpendicular to the face of the coil and whose magnitude is decreasing at a rate ${\rm d}B/{\rm d}t=−0.040~ \rm T/s$.
- What is the magnitude of the potential difference induced in the coil?
- What is the magnitude of the current circulating through the coil?
Fig. 5: A square coil with N turns of wire with uniform magnetic field B directed in the downward direction, perpendicular to the coil 
\begin{align*} \Phi_{\rm m} = B \cdot A \end{align*}
We can calculate the magnitude of the potential difference $|u_{\rm ind}|$ from Faraday’s law:
\begin{align*} |u_{\rm ind}| &= |- {{\rm d}\over{{\rm d}t}}(N \cdot \Phi_{\rm m})| \\ &= |-N \cdot {{\rm d}\over{{\rm d}t}}(B \cdot A) | \\ &= |-N \cdot l^2 \cdot {{{\rm d}B}\over{{\rm d}t}}| \\ &= (200)(0.25 ~\rm m)^2(0.040 ~T/s) \\ &= 0.50 ~V \end{align*}
The magnitude of the current induced in the coil is
\begin{align*} |I| &= {{ |u_{\rm ind}|}\over{R}} \\ &= {{0.50 ~\rm V}\over{5.0 ~\Omega}} = 0.10 ~\rm A \\ \end{align*}
Exercise 4.1.2 Magnetic Field Strength around a horizontal straight Conductor
A closely wound coil has a radius of $4.0 ~\rm cm$, $50$ turns, and a total resistance of $40~\Omega$.
At what rate must a magnetic field perpendicular to the face of the coil change in order to produce Joule heating in the coil at a rate of $2.0 ~\rm mW$?
4.2 Lenz Law
The direction in which the induced potential difference drives current around a wire loop can be found through the negative sign. However, it is usually easier to determine this direction with Lenz’s law, named in honor of its discoverer, Heinrich Lenz (1804–1865). (Faraday also discovered this law, independently of Lenz.) We state Lenz’s law as follows:
Notice:
Lenz's LawThe direction of the induced potential difference drives current around a wire loop to always oppose the change in magnetic flux that causes the potential difference.
Lenz’s law can also be considered in terms of the conservation of energy. If pushing a magnet into a coil causes current, the energy in that current must have come from somewhere. If the induced current causes a magnetic field opposing the increase in the field of the magnet we pushed in, then the situation is clear. We pushed a magnet against a field and did work on the system, and that showed up as current. If it were not the case that the induced field opposes the change in the flux, the magnet would be pulled in produce a current without anything having done work. Electric potential energy would have been created, violating the conservation of energy.
To determine an induced potential difference $u_{\rm ind}$, you first calculate the magnetic flux $\Phi_{\rm m}$ and then obtain ${\rm d}\Phi_{\rm m} / {\rm d}t$. The magnitude of $u_{\rm ind}$ is given by
\begin{align*} |u_{\rm ind}| &= \left|-{{\rm d}\over{{\rm d}t}}\Phi_{\rm m}\right| \end{align*}
Finally, you can apply Lenz’s law to determine the sense of $u_{\rm ind}$. This will be developed through examples that illustrate the following problem-solving strategy.
Notice:
Problem-Solving Strategy: Lenz’s LawTo use Lenz’s law to determine the directions of induced potential difference, currents, and magnetic fields:
- Make a sketch of the situation to visualize and record the directions of fields, movements etc. .
- Determine the direction of the applied magnetic field $\vec{B}$.
- Determine whether the magnitude of its magnetic flux is increasing or decreasing.
- Now determine the direction of the induced magnetic field $\vec{B_{\rm ind}}$.
The induced magnetic field attempts to withstand its cause: It tries to strengthen a decreasing magnetic flux (or to counteract an increasing magnetic flux). Therefore, the induced magnetic field adds or subtracts from the applied magnetic field, depending on the change in magnetic flux. - Use the right-hand rule to determine the direction of the induced current $i_{\rm ind}$ that is responsible for the induced magnetic field $\vec{B}_{\rm ind}$.
- The direction (or polarity) of the induced potential difference can now drive a conventional current in this direction.
Let’s apply Lenz’s law to the system of figure 5. We designate the “front” of the closed conducting loop as the region containing the approaching bar magnet, and the “back” of the loop as the other region. The north pole of the magnet moves toward the loop. Therefore, the flux through the loop due to the field of the magnet increases because the strength of field lines directed from the front to the back of the loop is increasing. A current is consequently induced in the loop. By Lenz’s law, the direction of the induced current must be such that its own magnetic field is directed in a way to oppose the changing flux caused by the field of the approaching magnet. Hence, the induced current circulates so that its magnetic field lines through the loop are directed from the back to the front of the loop. By the right-hand rule, place your thumb pointing against the magnetic field lines, which is toward the bar magnet. Your fingers wrap in a counterclockwise direction as viewed from the bar magnet. Alternatively, we can determine the direction of the induced current by treating the current loop as an electromagnet that opposes the approach of the north pole of the bar magnet. This occurs when the induced current flows as shown, for then the face of the loop nearer the approaching magnet is also a north pole.

Part (b) of the figure shows the south pole of a magnet moving toward a conducting loop. In this case, the flux through the loop due to the field of the magnet increases because the number of field lines directed from the back to the front of the loop is increasing. To oppose this change, a current is induced in the loop whose field lines through the loop are directed from the front to the back. Equivalently, we can say that the current flows in a direction so that the face of the loop nearer the approaching magnet is a south pole, which then repels the approaching south pole of the magnet. By the right-hand rule, your thumb points away from the bar magnet. Your fingers wrap in a clockwise fashion, which is the direction of the induced current.
An animation of this situation can be seen here.
4.3 Motional Induction
Magnetic flux depends on three factors:
- the strength of the magnetic field,
- the area through which the field lines pass, and
- the orientation of the field with the surface area.
If any of these quantities vary, a corresponding variation in magnetic flux occurs. So far, we’ve only considered flux changes due to a changing field. Only the causing magnet was moving. This type of induction is called static induction (or stationary induction, in German: Ruheinduktion).
Now we look at another possibility: a changing area through which the field lines pass including a change in the orientation of the area. This leads us to motional induction
Two examples of this type of flux change are represented in figure 7.
- In part (a), the magnetic flux changes as a loop moves into a magnetic field. The flux through the rectangular loop increases as it moves into the magnetic field,
- In part (b), magnetic flux changes as a loop rotates in a magnetic field. The flux through the rotating coil varies with the angle $\varphi$.
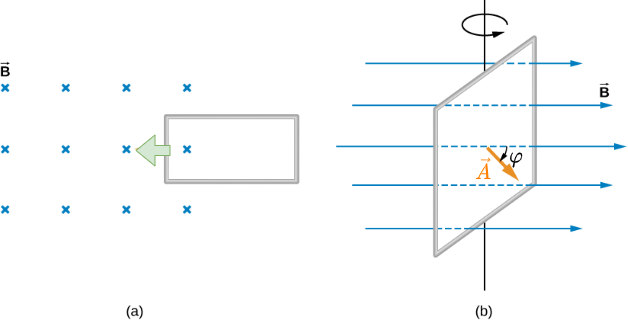
It’s interesting to note that what we perceive as the cause of a particular flux change actually depends on the frame of reference we choose. For example, if you are at rest relative to the moving coils of figure 7 (b), you would see the flux vary because of a changing magnetic field. In part (a), the field moves from left to right in your reference frame, and in part (b), the field is rotating. It is often possible to describe a flux change through a coil that is moving in one particular reference frame in terms of a changing magnetic field in a second frame, where the coil is stationary. However, reference-frame questions related to magnetic flux are beyond this introduction. We’ll avoid such complexities by always working in a frame at rest relative to the laboratory and explaining flux variations as due to either a changing field or a changing area.
Single Rod
The first step to investigate the motional induction is shown in figure 8: a single conducting rod with the length $\vec{l}$ which is moving with a constant velocity $\vec{v}$ through a homogenous magnetic field $\vec{B} \perp \vec{v} \perp \vec{l}$.
- The charges in the rod experience the Lorentz force $\vec{F}_{\rm L}$.
- By this force, the positive charges move to one end of the rod and the negative to the other one.
- The separated charges create a potential difference and by this, a Coulomb force $\vec{F}_{\rm C}$ onto the charges within the rod.
- For a constant speed, the Lorentz force onto charges in the rod must have the same magnitude as the Coulomb force.

This leads to:
\begin{align*} \vec{F}_{\rm C} &= - \vec{F}_{\rm L} \\ Q \cdot \vec{E}_{\rm ind} &= - Q \cdot \vec{v} \times \vec{B} \\ \vec{E}_{\rm ind} &= - \vec{v} \times \vec{B} \\ \end{align*}
The induced potential difference in the rod will be:
\begin{align*} u_{\rm ind} &= \int_l \vec{E}_{\rm ind} \cdot {\rm d} \vec{s} \\ &= - \int^0_1 \vec{v} \times \vec{B} \cdot {\rm d} \vec{s} \\ \end{align*}
For constant $|\vec{v}|$ and $|\vec{B}|$ this leads to: \begin{align*} u_{\rm ind} &= - v \cdot B \cdot l \\ \end{align*}
Rod in Circuit
Now let’s look at the conducting rod pulled in a circuit, changing magnetic flux. The area enclosed by the circuit '0123' of figure 9 is $l\cdot x$ and is perpendicular to the magnetic field.

The velocity of the rod is $v={\rm d}x/{\rm d}t$. So the induced potential difference will get \begin{align*} u_{\rm ind} &= - v \cdot B \cdot l \\ &= - {{{\rm d}x}\over{{\rm d}t}} \cdot B \cdot l \\ &= - {{B \cdot l \cdot {\rm d}x}\over{{\rm d}t}} \\ &= - {{B \cdot {\rm d}A}\over{{\rm d}t}} \\ &= - {{{\rm d}\Phi_{\rm m}}\over{{\rm d}t}} \\ \end{align*}
This is an alternative way to deduce Faraday's Law.
The current $i_{\rm ind}$ induced in the given circuit is $u_{\rm ind}$ divided by the resistance $R$
\begin{align*} i_{\rm ind} = {{v \cdot B \cdot l }\over{R}} \end{align*}
Furthermore, the direction of the induced potential difference satisfies Lenz’s law, as you can verify by inspection of the figure.
The situation of the single rod can be interpreted in the following way: We can calculate a motionally induced potential difference with Faraday’s law even when an actual closed circuit is not present. We simply imagine an enclosed area whose boundary includes the moving conductor, calculate $\Phi_{\rm m}$, and then find the potential difference from Faraday’s law. For example, we can let the moving rod of figure 10 be one side of the imaginary rectangular area represented by the dashed lines. The area of the rectangle is $A = l \cdot x$, so the magnetic flux through it is $\Phi= B\cdot l \cdot x$. Differentiating this equation, we obtain
\begin{align*} u_{\rm ind} &= - {{\rm d}\over{{\rm dt}}} \cdot \Phi_{\rm m} \\ &= - B \cdot l \cdot {{{\rm d}x}\over{{\rm d}t}} \\ &= - B \cdot l \cdot v \\ \end{align*}
which is identical to the potential difference between the ends of the rod that we determined earlier.

Exercise 4.3.1 Calculating the Large Motional Potential difference of an Object in Orbit
Calculate the potential difference motionally induced along a $20.0 ~\rm km$ conductor moving at an orbital speed of $7.80 ~\rm km/s$ perpendicular to Earth’s $5.00 \cdot 10^{-5} ~\rm T$ magnetic field.
Entering the given values into $u_{\rm ind} = - B \cdot l \cdot v$ gives
\begin{align*} u_{ind} &= - {{{\rm d} \Phi_{\rm m}}\over{{\rm d}t}} \\ &= - B \cdot l \cdot v \\ &= - (5.00 \cdot 10^{-5}~\rm T)(20.0 \cdot 10^{3} ~\rm m)(7.80\cdot 10^{3} ~\rm m/s) \\ \end{align*}
Exercise 4.3.2 A Metal Rod Rotating in a Magnetic Field
Part (a) of figure 11 shows a metal rod $\rm OS$ that is rotating in a horizontal plane around point $\rm O$. The rod slides along a wire that forms a circular arc $\rm PST$ of radius $r$. The system is in a constant magnetic field $\vec{B}$ that is directed out of the page.
If you rotate the rod at a constant angular velocity $\omega$, what is the current $I_{\rm ind}$ in the closed loop $\rm OPSO$? Assume that the resistor $R$ furnishes all of the resistance in the closed loop.
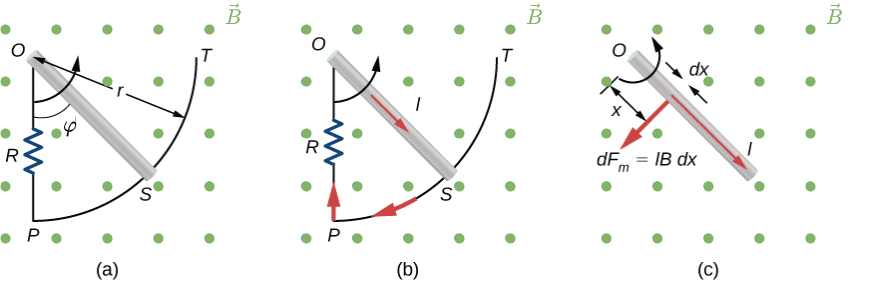
\begin{align*} \Phi_{\rm m} &= B\cdot A \\ &= B\cdot {{r^2\varphi}\over{2}} \\ \end{align*}
Differentiating with respect to time and using $\omega = d\varphi/dt$ , we have
\begin{align*} u_{\rm ind} &= |{{\rm d}\over{{\rm d}t}} \cdot \Phi_{\rm m} | \\ &= B\cdot {{r^2\omega}\over{2}} \end{align*}
When divided by the resistance $R$ of the loop, this yields the magnitude of the induced current
\begin{align*} i_{\rm ind} &= {{|u_{\rm ind}|}\over{R}} \\ &= B\cdot {{r^2\omega}\over{2R}} \end{align*}
As $\varphi$ increases, so does the flux through the loop due to $\vec{B}$. To counteract this increase, the magnetic field due to the induced current must be directed into the page in the region enclosed by the loop. Therefore, as part (b) of figure 11 illustrates, the current circulates clockwise.
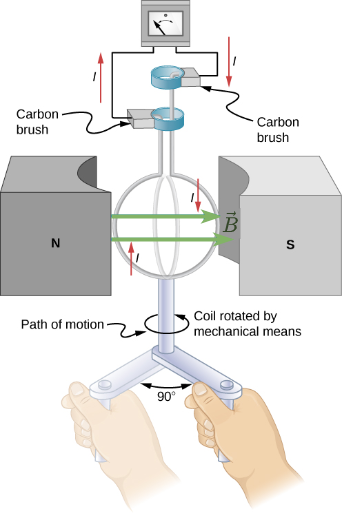
Exercise 4.3.3 A Rectangular Coil Rotating in a Magnetic Field
The following example is the basis for an electric generator: A rectangular coil of area $A$ and $N$ turns is placed in a uniform magnetic field $\vec{B}$, as shown in figure 12. The coil is rotated about the $z$-axis through its center at a constant angular velocity $\omega$.
Obtain an expression for the induced potential difference $u_{\rm ind}$ in the coil.
\begin{align*} \Phi_{\rm m} &= \iint \vec{B} {\rm d}\vec{A} \\ &= BA\cdot \cos \varphi \\ \end{align*}
From Faraday’s law, the induced potential difference in the coil is
\begin{align*} u_{\rm ind} &= - N {{\rm d}\over{{\rm d}t}} \Phi_{\rm m} \\ &= NBA \cdot \sin \varphi \cdot {{{\rm d}\varphi}\over{{\rm d}t}} \end{align*}
The constant angular velocity is $\omega = {\rm d}\varphi/{\rm d}t$. The angle $\varphi$ represents the time evolution of the angular velocity or $\omega t$. This changes the function to time-space rather than $\varphi$. The induced potential difference, therefore, varies sinusoidally with time according to
\begin{align*} u_{\rm ind} &= U_{\rm ind,0} \cdot \sin \omega t \end{align*}
where $U_{\rm ind,0} = NBA\omega$.
Exercise 4.3.4 Calculating the Potential Difference Induced in a Generator Coil
The generator coil shown in figure 13 is rotated through one-fourth of a revolution (from $\varphi_0=0°$ to $\varphi_1=90°$) in $5.0 ~\rm ms$. The $200$-turn circular coil has a $5.00 ~\rm cm$ radius and is in a uniform $0.80 ~\rm T$ magnetic field.
What is the value of the induced potential difference?
Fig. 13: When this generator coil is rotated through one-fourth of a revolution, the magnetic flux changes from its maximum to zero, inducing a potential difference. 
\begin{align*} u_{\rm ind} &= - N {{{\rm d} \Phi_{\rm m}}\over{{\rm d}t}} \end{align*}
We recognize this situation as the same one in the exercise before. According to the diagram, the projection of the surface vector $\vec{A}$ to the magnetic field is initially ${A}\cdot \cos \varphi$, and this is inserted by the definition of the dot product. The magnitude of the magnetic field and the area of the loop are fixed over time, which makes the integration simplify quick. The induced potential difference is written out using Faraday’s law:
\begin{align*} u_{\rm ind} &= N B A \cdot \sin \varphi \cdot {{{\rm d} \varphi}\over{{\rm d}t}} \end{align*}
The area of the loop is
\begin{align*} A = \pi r^2 = 3.14 \cdot (0.0500~\rm m)^2 = 7.85 \cdot 10^{-3} ~\rm m^2 \end{align*}
\begin{align*} U_{\rm ind} &= 200 \cdot 0.80 ~\rm T \cdot (7.85 \cdot 10^{-3} ~\rm m^2) \cdot \sin 90° \cdot {{\pi /2}\over{5.0 \cdot 10^{-3} ~\rm s}} = 395 ~\rm V \end{align*}
4.4 Self-Induction
Linked Flux
When looking at the magnetic field in a coil multiple windings capture the passing flux, see figure 14 (a). Each winding will create a potential difference. It can also be interpreted in such a way that the flux is going through the closed surface of the circuit multiple times (in picture (b)).

The resulting electric voltage in such a situation is given by the sum of the induced potential differences in each winding.
\begin{align*} u_{\rm ind} &= - {{{\rm d} \Phi_{\rm sum}}\over{{\rm d}t}} \\ &= - \sum_{i=1}^n {{{\rm d} \Phi_{i}}\over{{\rm d}t}} \\ \end{align*}
The linked flux $\Psi$ is defined as the resulting flux given by the sum of the partial fluxes of the closed circuit.
\begin{align*} \boxed{ \Psi = \sum_{i=1}^n \Phi_{i} } \end{align*}
The linked flux simplifies the induced electric voltage of a coil to:
\begin{align*} u_{\rm ind} &= - N \cdot {{{\rm d} \Phi}\over{{\rm d}t}} \\ &= - {{\rm d}\over{{\rm d}t}} \Psi \\ \end{align*}
Self-Induction
Up to now, we investigated the induction of electric voltages and currents based on the change of an external flux ${\rm d}\Psi / {\rm d}t$. For the induced current $i_{\rm ind}$, we found that it counteracts the change of the external flux (Lenz law).
But what happens, when there is no external field - only a coil which creates the flux change itself (see figure 15)?

To understand this, we will investigate the situation for a long coil (figure 16).

The created field density of the coil can be derived from Ampere's Circuital Law
\begin{align*} \theta(t) &= \int & \vec{H}(t) \cdot {\rm d}\vec{s} \\ &= \int & \vec{H}_{\rm inner}(t) \cdot {\rm d}\vec{s} & + & \int \vec{H}_{\rm outer}(t) \cdot {\rm d} \vec{s} \\ &= \int & \vec{H}(t) \cdot {\rm d}\vec{s} & + & 0 \\ &= & {H}(t) \cdot l \\ \end{align*}
With magnetic voltage $\theta(t) = N \cdot i$ this lead to the magnetic flux density $B(t)$
\begin{align*} N \cdot i &= {H}(t) \cdot l \\ {H}(t) &= {{N \cdot i }\over {l}} \\ {B}(t) &= \mu_0 \mu_{\rm r} \cdot {{N \cdot i }\over {l}} \\ \end{align*}
Based on the magnetic flux density $B(t)$ it is possible to calculate the flux $\Phi(t)$:
\begin{align*} \Phi(t) &= \iint_A \vec{B}(t) \cdot {\rm d}\vec{A} \\ &= \iint_A \mu_0 \mu_{\rm r} \cdot {{N \cdot i }\over {l}} \cdot {\rm d}A \\ &= \mu_0 \mu_{\rm r} \cdot {{N \cdot i }\over {l}} \cdot A \\ \end{align*}
The changing flux $\Phi$ is now creating an induced electric voltage and current, which counteracts the initial change of the current. This effect is called Self Induction. The induced electric voltage $u_{\rm ind}$ is given by:
\begin{align*} u_{\rm ind} &= - N \cdot {{{\rm d} \Phi(t)}\over{{\rm d}t}} \\ &= - N \cdot {{{\rm d} (\mu_0 \mu_{\rm r} \cdot {{N \cdot i }\over {l}} \cdot A)}\over{{\rm d}t}} \\ &= - N \cdot \mu_0 \mu_{\rm r} \cdot {{N \cdot A }\over {l}} \cdot {{{\rm d}i}\over{{\rm d}t}} \\ \end{align*}
\begin{align*} \boxed{ u_{\rm ind} = - \mu_0 \mu_{\rm r} \cdot N^2 \cdot {{A }\over {l}} \cdot {{{\rm d}i}\over{{\rm d}t}} \\ } \\ \text{for a long coil} \end{align*}
The result means that the induced electric voltage $u_{\rm ind}$ is proportional to the change of the current ${{\rm d}\over{{\rm d}t}}i$. The proportionality factor is also called Self-inductance $L$ (or often simply called inductance).
4.5 Inductance
The inductance is another passive basic component of the electric circuit. Besides the ohmic resistor $R$ and the capacitor $C$, the inductor $L$ is the lump component entailing the inductance.
Generally, the inductance is defined by: \begin{align*} \boxed{ L = \left|{{u_{\rm ind}}\over{{\rm d}i / {\rm d}t}}\right| \\ } \end{align*}
The inductance $L$ can also be described differently based on Lenz law $u_{\rm ind} = - {{\rm d}\over{{\rm d}t}}\Psi(t)$ :
\begin{align*} L &= \left|{{u_{\rm ind}}\over{{\rm d}i / {\rm d}t}}\right| \\ &= {{{d \Psi(t)}/{dt}}\over{{\rm d}i / {\rm d}t}} \\ \end{align*}
\begin{align*} \boxed{ L = {{ \Psi(t)}\over{i}} } \end{align*}
One can also consider an inductor a “conservative person”: it does not like to see abrupt changes in the passing current. It reacts to any change in the current with a counteracting voltage since the current change leads to a changing flux and - therefore - an induced voltage. The figure 17 shows an inductor in series with a resistor and a switch (any real switch also behaves as a capacitor, when open). Once the simulation is started, the inductor directly counteracts the current, which is why the current only slowly increases.
The unit of the inductance is $\rm 1 ~Henry = 1 ~H = 1 {{Vs}\over{A}} = 1{{Wb}\over{A}} $
Mathematically the voltages can be described in the following way:
\begin{align*} u_0 &= u_R &+ &u_L \\ &= i \cdot R & + & {{{\rm d}\Psi}\over{{\rm d}t}} \\ &= i \cdot R & + &L \cdot {{{\rm d}i}\over{{\rm d}t}} \\ \end{align*}
Inductance of different Components
Long Coil
In the last sub-chapter, the formula of a long coil was already investigated. By these, the inductance of a long coil is
\begin{align*} \boxed{L_{\rm long \; coil} = \mu_0 \mu_{\rm r} \cdot N^2 \cdot {{A }\over {l}}} \end{align*}
Toroidal Coil
The toroidal coil was analyzed in the last chapter(see magnetic Field Strength Part 1: Toroidal Coil). Here, a rectangular intersection a assumed (see figure 18).

This leads to
\begin{align*} H(t) = {{N \cdot i}\over {l}} \end{align*}
with the mean magnetic path length (= length of the average field line) $l = \pi(r_{\rm o} + r_{\rm i})$:
\begin{align*} H(t) = {{N \cdot i}\over { \pi(r_{\rm o} + r_{\rm i})}} \end{align*}
The inductance $L$ can be calculated by
\begin{align*} L_{\rm toroidal \; coil} &= {{ \Psi(t)}\over{i}} \\ &= {{ N \cdot \Phi(t)}\over{i}} \\ \end{align*}
With the magnetic flux density $B(t) = \mu_0 \mu_{\rm r} H(t) = \mu_0 \mu_{\rm r} {{i \cdot N }\over {l}}$ and the cross section $A = h (r_{\rm o} - r_{\rm i})$, we get:
\begin{align*} \quad \quad L_{\rm toroidal \; coil} &= {{ N \cdot \mu_0 \mu_{\rm r} {{i \cdot N } \over { \pi(r_{\rm o} + r_{\rm i})}} \cdot h(r_{\rm o} - r_{\rm i})}\over{i}} \\ &= {{ N^2 \cdot \mu_0 \mu_{\rm r} \cdot h(r_{\rm o} - r_{\rm i})}\over{ \pi(r_{\rm o} + r_{\rm i})}} \\ \end{align*}
\begin{align*} \boxed{ L_{\rm toroidal \; coil} = \mu_0 \mu_{\rm r} \cdot N^2 \cdot {{ h(r_{\rm o} - r_{\rm i})}\over{ \pi(r_{\rm o} + r_{\rm i})}} } \end{align*}
Exercises
Exercise 4.1.4 Effects of induction I
A change of magnetic flux is passing a coil with a single winding. The following pictures figure 19 show different flux-time-diagrams as examples.
- Create for each $\Phi(t)$-diagram the corresponding $u_{\rm ind}(t)$-diagram!
- Write down each maximum value of $u_{\rm ind}(t)$

For diagram (a):
- $t= 0.0 ... 0.6 ~\rm s$: $u_{\rm ind} = -{{0 ~\rm Vs}\over{0.6 ~\rm s}}= 0$
- $t= 0.6 ... 1.5 ~\rm s$: $u_{\rm ind} = -{{-3.75\cdot 10^{-3} ~\rm Vs}\over{0.9 ~\rm s}}= +4.17 ~\rm mV$
- $t= 1.5 ... 2.1 ~\rm s$: $u_{\rm ind} = -{{0 ~\rm Vs}\over{0.6 ~\rm s}}= 0$

Exercise 4.1.5 Effects of induction II
A changing of magnetic flux is passing a coil with a single winding and induces the voltage $u_{\rm ind}(t)$. The following pictures figure 21 show different voltage-time diagrams as examples.
- Create for each $u_{\rm ind}(t)$-diagram the corresponding $\Phi(t)$-diagram!
- Write down each maximum value of $\Phi(t)$
Note the given start value $\Phi_0$ for each flux.

For partwise linear $u_{\rm ind}$ one can derive: \begin{align*} u_{\rm ind} &= -{{{\rm d}\Phi}\over{{\rm d}t}} \\ \rightarrow \Phi &= -\int_0^t{ u_{\rm ind} \;{\rm d}t} \\ \Phi &= \Phi_0 -\sum_k {u_{{\rm ind},~k} \; \Delta t} \\ \end{align*}
For diagram (a):
- $t= 0.00 ... 0.04 ~\rm s\quad$: $\quad \Phi = \Phi_0 - {0 \cdot \; \Delta t} \quad\quad\quad\quad\quad\quad\quad= 0 ~\rm Wb$
- $t= 0.04 ... 0.10 ~\rm s\quad$: $\quad \Phi = 0 {~\rm Wb} - {{30 ~\rm mV} \cdot \; (t - 0.04 ~\rm s)} = \quad {1.2 ~\rm mWb} - t \cdot 30 ~\rm mV$
- $t= 0.10 ... 0.14 ~\rm s\quad$: $\quad \Phi = {1.2 ~\rm mWb} - {0.10 ~\rm s} \cdot 30 ~\rm mV \quad = - {1.8 ~\rm mWb}$

Exercise 4.1.6 Coil in magnetic Field I
A single winding is located in a homogenous magnetic field ($B = 0.5 ~\rm T$) between the pole pieces. The winding has a length of $150 ~\rm mm$ and a distance between the conductors of $50 ~\rm mm$ (see figure 22).
- Determine the function $u_{\rm ind}(t)$, when the coil is rotating with $3000 ~\rm min^{-1}$.
- Given a current of $20 ~\rm A$ through the winding: What is the torque $M(\varphi)$ depending on the angle between the surface vector of the winding and the magnetic field?

Exercise 4.1.7 Coil in magnetic Field II
A rectangular coil is given by the sizes $a=10 ~\rm cm$, $b=4 ~\rm cm$, and the number of windings $N=200$. This coil moves with a constant speed of $v=2 ~\rm m/s$ perpendicular to a homogeneous magnetic field ($B=1.3 ~\rm T$ on a length of $l=5 ~\rm cm$). The area of the coil is tilted with regard to the field in $\alpha=60°$ and enters the field from the left side (see figure 23).
- Determine the function $u_{\rm ind}(t)$ on the coil along the given path. Sketch of the $u_{\rm ind}(t)$ diagram.
- What is the maximum induced voltage $u_{\rm ind,Max}$?

Step 1: Calculate the effective area, perpendicular to the $\vec{B}$-field (independent from whether the area is in the $\vec{B}$-field or not).
For this $b$ has to be projected onto the plane perpendicular to the $\vec{B}$-field: $b_{\rm eff}= b \cdot \cos \alpha$ \begin{align*} A_{\rm eff} &= a \cdot b \cdot \cos \alpha \end{align*}
Step 2: Focus on entering and exiting the $\vec{B}$-field.
Induction only occurs for ${{\rm d}\over{{\rm d}t}}(A\cdot B)\neq 0$, so here: when the area $A_{\rm eff}$ enters and leave the constant $\vec{B}$-field.
When entering the $\vec{B}$-field the area $A$ with $0<A<A_{eff}$ is in the field. The area moves with $v$. Therefore, after $\Delta t = b_{\rm eff} \cdot v$ the full $\vec{B}$-field is provided onto the area $A_{\rm eff}$: \begin{align*} u_{\rm ind} &= - {{{\rm d}\Psi}\over{{\rm d}t}} \\ &= -N \cdot {{\rm d}\over{{\rm d}t}} B \cdot A \\ &= -N \cdot {{1}\over{\Delta t}} B \cdot A_{\rm eff} \\ &= -N \cdot {{1}\over{b \cdot \cos \alpha \cdot v}} B \cdot a \cdot b \cdot \cos \alpha \\ &= -N \cdot B \cdot {{a}\over{v}}\\ \end{align*}
The following diagram shows …
- … how one can derive the effective width $b_{\rm eff}$, which is projected onto the plane perpendicular to the $\vec{B}$-field: $b_{\rm eff}= b \cdot \cos \alpha$
- … what happens on the effective area $A_{\rm eff}$: there is a change of the field lines in the area only for entering and leaving the $\vec{B}$-field.
- … how the $u_{\rm ind}(t)$ looks as a graph: the part of $A_{\rm eff}$, where the $\vec{B}$-field passes through increase linearly due to the constant speed $v$
Be aware, that the task did not provide a clue for the direction of windings and therefore it provides no clue for the polarization of the induced voltage.
So, the course of the voltage when entering or exiting is not uniquely given.

Exercise 4.5.1 Self Induction I
Calculate the inductance for the following settings
1. Cylindrical long air coil with $N=390$, winding diameter $d=3.0 ~\rm cm$ and length $l=18 ~\rm cm$
\begin{align*} L_1 &= \mu_0 \mu_{\rm r} \cdot N^2 \cdot {{A }\over {l}} \\ &= 4\pi \cdot 10^{-7} {\rm {{H}\over{m}}} \cdot 1 \cdot (390)^2 \cdot {{\pi \cdot (0.03~\rm m)^2 }\over {0.18 ~\rm m}} \end{align*}
2. Similar coil geometry as explained in 1. , but with double the number of windings
3. Two coils as explained in 1. in series
4. Similar coil geometry and number of windings as explained in 1. , but with an iron core ($\mu_{\rm r}=1000$)
Exercise 4.5.2 Self Induction II
A cylindrical air coil (length $l=40 ~\rm cm$, diameter $d=5.0 ~\rm cm$, and a number of windings $N=300$) passes a current of $30 ~\rm A$. The current shall be reduced linearly in $2.0 ~\rm ms$ down to $0.0 ~\rm A$.
What is the amount of the induced voltage $u_{\rm ind}$?
The requested induced voltage can be derived by:
\begin{align*} L &= \left|{{u_{\rm ind}}\over{{\rm d}i / {\rm d}t}}\right| \\ \rightarrow \left|u_{\rm ind}\right| &= L \cdot \left|{{{\rm d}i}\over{{\rm d}t}}\right| \\ &= L \cdot \left|{{\Delta i}\over{\Delta t}}\right| \\ \end{align*}
Therefore, we just need the inductance $L$, since ${{\Delta i}\over{\Delta t}}$ is defined as $30 ~\rm A$ per $2 ~\rm ms$:
\begin{align*} L &= \mu_0 \mu_{\rm r} \cdot N^2 \cdot {{A }\over {l}} \\ \end{align*}
So, the result can be derived as: \begin{align*} \left|u_{\rm ind}\right| &= \mu_0 \mu_{\rm r} \cdot N^2 \cdot {{A }\over {l}} \cdot \left|{{\Delta i}\over{\Delta t}}\right| \\ &= 4\pi \cdot 10^{-7} {\rm {{H}\over{m}}} \cdot 1 \cdot (300)^2 \cdot {{\pi \cdot (0.05~\rm m)^2 }\over {0.40 ~\rm m}} \cdot {{30 ~\rm A}\over{2 ~\rm ms}} \end{align*}
Exercise 4.5.3 Self Induction III
A coil with the inductance $L=20 ~\rm µH$ passes a current of $40 ~\rm A$. The current shall be reduced linearly in $5 ~\rm µs$ down to $0 ~\rm A$ (see figure 25).
- What is the amount of the induced voltage $u_{\rm ind}$?
- Sketch the course of $u_{\rm ind}(t)$!
