Dies ist eine alte Version des Dokuments!
10. I2C Schnittstelle
Ziele
Nach dieser Lektion sollten Sie:
- wissen wie die Kommunikation zwischen I2C Master und Slave funktioniert
Video
Dokumentation von Atmel
- alternative Implementierung von Elia Ritterbusch
Übersicht über die am häufigsten verwendeten, seriellen Schnittstellen
USART
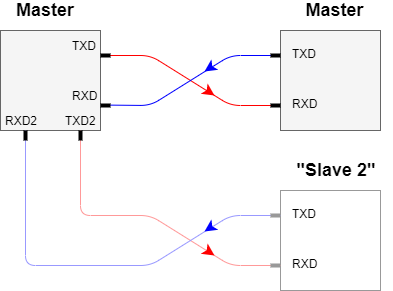
- Keine gibt Takt vor.
Es sind gleichberechtigte Kommunikationspartner (siehe Abbildung ##). - Jeder darf zu jederzeit senden.
- Senden und Empfangen geschieht über zwei separate Leitungen.
- Kommunikation ist nur zwischen zwei Geräten möglich.
Ein weiterer Slave würde eine weiteren U(S)ART-Bus benötigen.
I2C
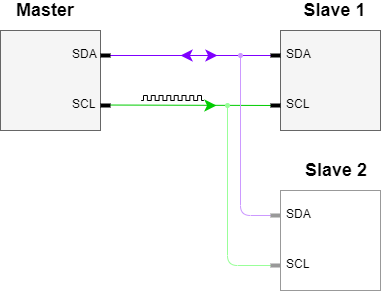
- Master gibt Takt vor (siehe Abbildung ##).
- Slave darf nur zu bestimmten Zeiten senden und nur, wenn der Master dies anfordert.
- Senden und Empfangen geschieht über die gleiche Leitung.
- Alle Slaves hören am gleichen Bus mit und schreiben auf die gleiche Leitung.
- Jeder Slave muss anhand der Signale überprüfen, ob die Daten für ihn gemeint sind.
SPI
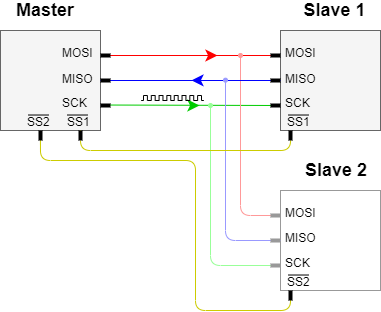
- Master gibt Takt vor (siehe Abbildung ##).
- Slave darf nur zu bestimmten Zeiten senden und nur, wenn der Master dies anfordert.
- Senden und Empfangen geschieht über zwei separate Leitungen.
- Alle Slaves hören auf der gleichen Leitung mit und schreiben auf die gleiche Leitung.
- Der gewünschte Slave wird über die Slave Select Leitung ausgewählt.

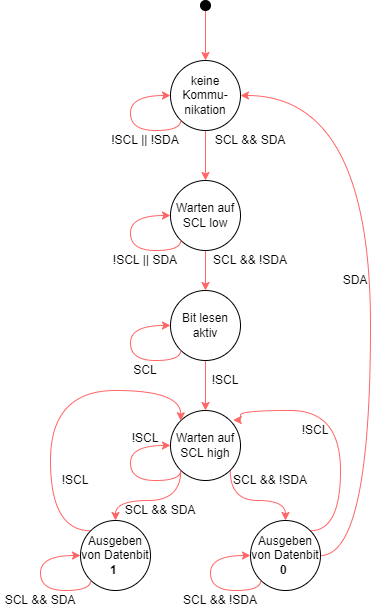
Statemachine für Datenpaket
Statemachine der I2C Kommunikation
I2C in Kürze und Zeitverlaufsdiagramm
Übertragung
Für die I2C Übertragung „trommelt“ der Master-IC auf der Taktleitung (SCL). Bei jedem „Trommelschlag“ (SCL=High), darf der Slave die Datenleitung (SDA) lesen.
D.h. während der Datenübertragung bleibt die Datenleitung bei SCL=High konstant.
Eine Flanke (=Signalwechsel) auf der Datenleitung während SCL=High definiert Beginn und Ende der Kommunikation.
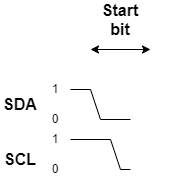
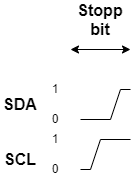
Eine fallende Flanke auf SDA bei SCL=High stellt das Startbit dar, eine steigende Flanke das Stoppbit.
Läuft keine Kommunikation sind Daten- und Tankleitung auf High.

Startbedingung
Um die Übertragung zu beginnen muss die Startbedingung eingeleitet werden. Während SCL HIGH ist (a), geht SDA von HIGH auf LOW. Anschließend startet SCL mit LOW (b).
Für eine Startbedingung werden die Bits innerhalb des TWCR wie folgt gesetzt:
TWCR = (1<<TWINT)|(1<<TWEN); // Setting TWINT clears interupt flag
// to set the following state:
| (1<<TWIE ) // Enable TWI Interrupt.
| (1<<TWSTA)|(0<<TWSTO); // Initiate a START condition.
Übertragung
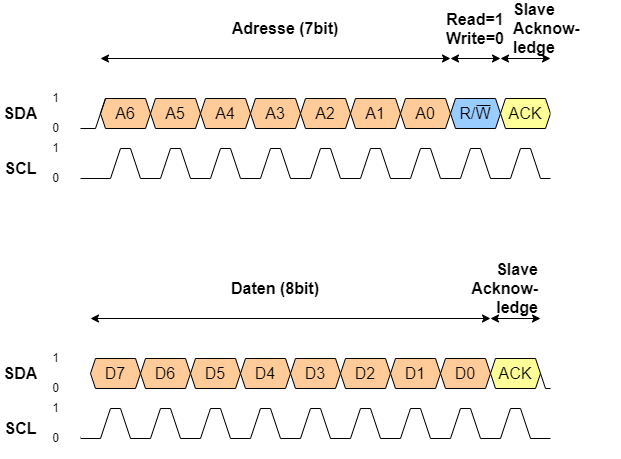
Die entscheidende Voraussetzung für eine erfolgreiche Bitübertragung ist, dass sich der Zustand von SDA nur ändern darf solange SCL auf LOW ist. Allerdings ist der Zustand von SDA erst gültig, wenn SCL auf HIGH ist.
Für die Übertragung eines Bytes muss TWDR und TWCR wie folgt gesetzt werden.
Zunächst wird die Übertragung der Adresse (SLA_W) betrachtet:
TWDR = SLA_W; // Load SLA_W into TWDR
TWCR = (1<<TWINT)|(1<<TWEN); // Setting TWINT clears interupt flag
// to start transmission of address
Die Daten (DATA) werden in gleicher Weise übertragen:
TWDR = DATA; // Load DATA into TWDR
TWCR = (1<<TWINT)|(1<<TWEN); // Setting TWINT clears interupt flag
// to start transmission of address
Stoppbedingung
Die Stoppbedingung beendet die Übertragung. SCL geht auf HIGH (c), anschließend wechselt die SDA-Leitung von LOW nach HIGH (d).
Für eine Stoppbedingung werden die Bits innerhalb des TWCR wie folgt gesetzt:
TWCR = (1<<TWINT)|(1<<TWEN); // Setting TWINT clears interupt flag
// to set the following state:
| (1<<TWIE ) // Enable TWI Interrupt.
| (0<<TWSTA)|(1<<TWSTO); // Initiate a STOP condition.
Software
TWI Master
/* ----------------------------------------------------------------------------
Experiment 10: I2C Kommunikation
============= ===============================
Dateiname : I2C_SimpleMaster.c
Autoren : Tim Fischer (Hochschule Heilbronn, Fakultaet T1)
Datum : 23.06.2021
Version : 1.0
Hardware: Simulide 0.5.16-RC5
Software: Entwicklungsumgebung: AtmelStudio 7.0
C-Compiler: AVR/GNU C Compiler 5.4.0
Funktion : TBD
Displayanzeige: TBD
Tastenfunktion: keine
Jumperstellung: keine
Fuses im uC: CKDIV8: Aus (keine generelle Vorteilung des Takts)
Header-Files: lcd_lib_de.h (Library zur Ansteuerung LCD-Display Ver.1.3)
// ----------------------------------------------------------------------------*/
// Deklarationen ==============================================================
// Festlegung der Quarzfrequenz
#define F_CPU 8000000UL // CPU Frequenz von 8MHz
#define F_SCL 40000L // Baudrate von 100 kHz
// Include von Header-Dateien
#include <stdio.h>
#include <avr/interrupt.h>
#include <math.h>
#include <util/delay.h>
// Konstanten
#define SET_BIT(PORT, BIT) ((PORT) |= (1 << (BIT))) // Port-Bit Zustand setzen
#define CLR_BIT(PORT, BIT) ((PORT) &= ~(1 << (BIT))) // Port-Bit Zustand loeschen
#define TGL_BIT(PORT, BIT) ((PORT) ^= (1 << (BIT))) // Port-Bit Zustand wechseln (toggle)
//Funktionsprototypen
void I2C_Init();
void I2C_transmitStart();
void I2C_transmitDataOrAddress(char Data);
void I2C_transmitStop();
void I2C_Data();
uint8_t TWI_Address = 0b0001010;
uint8_t TWI_Data = 0b00110111;
int main(void)
{
cli (); // Interrupt aktivieren
SET_BIT(DDRD, PORTD1); // Debug Ausgang ansprechen -> Wechsel auf low
TGL_BIT(PORTD, PORTD1); // Debug Ausgang ansprechen -> Wechsel auf High
I2C_Init(); // Initialisierung von TWI anstoßen
while (1)
{
TGL_BIT(PORTD, PORTD1); // Debug Ausgang ansprechen -> Wechsel auf High
I2C_Init(); // Initialisierung von TWI anstoßen
TGL_BIT(PORTD, PORTD1); // Debug Ausgang ansprechen -> Wechsel auf Low
I2C_transmitStart(); // Startbit schreiben
TGL_BIT(PORTD, PORTD1); // Debug Ausgang ansprechen -> Wechsel auf High
I2C_transmitDataOrAddress((TWI_Address<<1) + 0);// Adresse senden
TGL_BIT(PORTD, PORTD1); // Debug Ausgang ansprechen -> Wechsel auf Low
I2C_transmitDataOrAddress(TWI_Data);// Daten senden
TGL_BIT(PORTD, PORTD1); // Debug Ausgang ansprechen -> Wechsel auf High
I2C_transmitStop(); // Stoppbit schreiben
TGL_BIT(PORTD, PORTD1); // Debug Ausgang ansprechen -> Wechsel auf Low
_delay_us(1);
}
}
/////////////////////////////////////////
// I2C Initialisierung
/////////////////////////////////////////
void I2C_Init()
{
TWSR = CLR_BIT(TWSR, TWPS0);// Es wird kein Prescaler verwendet
TWSR = CLR_BIT(TWSR, TWPS1);//
TWCR = 0; //
TWBR = ((F_CPU/F_SCL)-16)/2;// die Bitrate wird mittels CPU Frequenz und Serial Clock Frequenz ermittelt
}
/////////////////////////////////////////
// I2C Startbit senden
/////////////////////////////////////////
void I2C_transmitStart()
{
TWCR = (1<<TWSTA)|(1<<TWEN)|(1<<TWINT); // TWSTA = Startbit aktivieren, TWEN = TWI starten (ENable), TWINT = Interrupt bit löschen (durch setzen)
while (!(TWCR & (1<<TWINT))){}; // warten bis Übertragung erfolgreich, Trigger ist hier das Setzen von TWINT
}
/////////////////////////////////////////
// I2C Adressbyte/Daten senden
/////////////////////////////////////////
void I2C_transmitDataOrAddress(char Data)
{
TWDR = Data;
TWCR = (1<<TWINT)|(1<<TWEN); // TWEN = TWI starten (ENable), TWINT = Interrupt bit löschen (durch setzen)
while (!(TWCR & (1<<TWINT))); // warten bis Übertragung erfolgreich, Trigger ist hier das Setzen von TWINT
}
/////////////////////////////////////////
// I2C Stoppbit senden
/////////////////////////////////////////
void I2C_transmitStop()
{
TWCR=(1<<TWSTO)|(1<<TWINT)|(1<<TWEN); // TWSTO = Stopptbit aktivieren, TWEN = TWI starten (ENable), TWINT = Interrupt bit löschen (durch setzen)
while (!(TWCR & (1<<TWINT))); // warten bis Übertragung erfolgreich, Trigger ist hier das Setzen von TWINT
// while(TWCR & (1<<TWSTO)); // warten bis Übertragung erfolgreich, Trigger ist hier das setzen von TWINT
}
TWI Slave
Beispiele
- Simulide:
…\share\simulide\examples\Arduino\sofware_i2c_lcd\i2c_lcd-arduino(hierbei wird Software I2C eingesetzt) - Software I2C:
- Library von Peter Fleury: library, Dokumentation