Projekte des Sommersemesters 2024
Allgemeiner Verlauf
Aufgrund der Umstellung des EDA-Tools von eagle auf KiCAD kann ich die Kombination aus Elektronik-Labor (Elektronik-Entwicklung) und Mikrocontroller (Software-Entwicklung) dieses Semester nicht als eigen-initiatives Projekt mit dem Ziel einer fertigen Mikrocontroller-Elektronik anbieten.


Semesterablauf
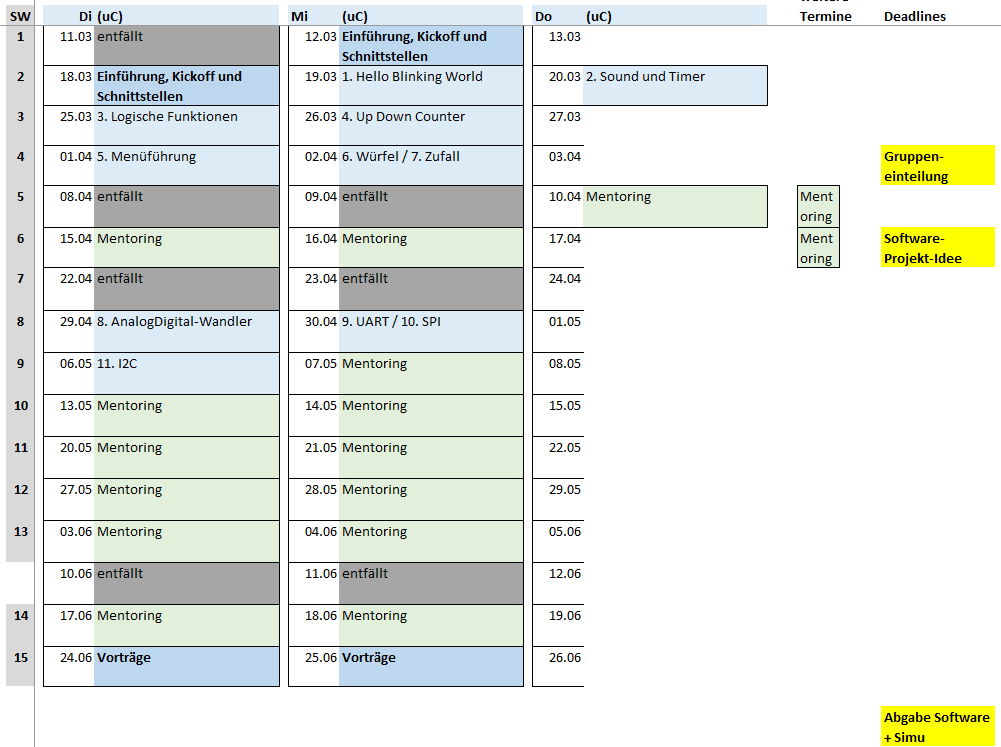
Legende
Pflichtveranstaltungen sind mit fetter Schrift gekennzeichnet.
Abgabetermine
- 05.04.2024 - spätester Termin für das Fixieren der Hardware- und Software-Projekt-Idee. Diese sollte vorher bereits mit mir geklärt worden sein. Es zählt der Zeitstempel der Mail.
- 03.05.2024 - spätester Termin für die Abgabe der finalen Schaltungsentwicklung (*.sch und *brd) über Redmine. Es zählt der Zeitstempel des Servers.
- 31.05.2024 - spätester Termin für die Abgabe des finalen Boardentwicklung (*.sch und *.brd) über Redmine. Es zählt der Zeitstempel des Servers.
- 25.06.2024 + 27.06.2024 Termin für Präsentation
- 01.07.2024 - spätester Termin für die Abgabe der Software und der Doku (*.simu, *.h und *.c, ggf. kurzer Kommentar in txt-File) über Redmine. Es zählt der Zeitstempel des Servers.
Vorgaben - Elektronik Labor
Ziel ist, dass Sie im Elektronik-Labor die Entwicklung von Elektronik lernen. Dazu werden Sie in diesem Semester in Gruppenarbeit OP-Grundschaltungen und Filterschaltungen (siehe Projekte) entwickeln. Die praktische Arbeit umfasst folgende Punkte:
- Konzeption und Auslegung von Schaltungen
- Sofern keine genaue Anwendung gegeben ist, kann eine solche gesucht und zur weiteren Auslegung verwendet werden (nach Rücksprache sind auch die gegebenen Parameter veränderbar).
- Simulation in Falstad oder Tina TI
- Analyse der notwendigen Datenblätter
- Größen und Position von weiteren Komponenten
- Komponentenauslegung
- alle Passivkomponenten als SMD (vorzugsweise Größe 0603)
- auch ICs in SMD (mit “Beinchen”, z.B. …QFP, …SOP aber keine Grid Arrays, d.h. …GA)
- Widerstands-Reihe: E24, Kondensator-Reihe: E12
- Aufbau diskret (also mit einzelnen Operationsverstärkern).
- Darstellung von kaufbaren IC's, welche die Funktion erfüllen erwünscht.
- Neben den Operationsverstärkern können Transistoren oder Kondensatoren zu verwenden und auszulegen sein.
- Für digital veränderbare Widerstände sind switched-Capacitor Widerstände oder Digitalpotis ansteuerbar über I2C-PWM-IC zu wählen.
-
- Basis ist Mexle 2020-System.
- Hookups auf Basis des Basis-Hookups, separaten Platinen auf Basis der MMC 1x1 328PB Platine.
- Spannungsniveau auf VCC ist $3,3 ~\rm V$. Wird eine andere Spannung benötigt, muss ein Spannungswandler (z.B. Ladungspumpe, LDO) oder (für mehr Leistung) eine weitere Schaubklemme vorgesehen werden!
- Belegung und Position von K1, K2 und JP sind vorgegeben.
- bitte helfen Sie einander, sodass der Aufwand gleichmäßig verteilt wird.
- Randbedingung für Zweiergruppen ist, ein Hookup zu entwickeln
- Dokumentation der Ergebnisse im Wiki. Ihre jeweilige Wikiseite erreichen Sie mittels des Links in der Tabelle (bei Projekt-Nr.).
Je nach Thema können folgende Punkte sinnvoll sein:- Erklärung von Auslegung und Layoutvorgaben
- Begründung der Bauteilauswahl
- Darstellung von Anwendungsgebieten und ggf. typische Spannungsverläufe
- Bodediagramm
- Gruppendelay
- Sprungantwort
- Darstellung des Ausgangssignals, je für PWM mit 50Hz, 100Hz, 500Hz, 1kHz, 7kHz, 10kHz, 40kHz, 50kHz
Hinweise zu Tina
- Eine Einführung zu Tina ist hier im Wiki zu finden
- Die Diagramme zu Amplitudengang, Frequenzgang und Gruppendelay können über
Analysis » AC Analysis » AC Transfer Characteristicerstellt werden. - Achten Sie darauf, dass es sich um in der Frequenz logarithmische Diagramme handelt.
- Wählen Sie die Achsenbeschriftung geeignet (z.B. Schritte in $20 ~\rm dB$, $90°$ und Dekaden).
- Sofern es in bei der Aufgabenstellung Angaben zur Werten im Bode-Diagramm gab, sollten diese eingezeichnet werden.
Vorgaben - Microcontroller
- Allgemeine Randbedingungen
- Programmiersprache ist C bzw. C++ (Arduino ist nicht möglich)
- Die Delay-Funktion darf nicht für die Zeit-Synchronisation im Millisekunden-Bereich genutzt werden!
Es ist eine Einteilung in Takte (10ms, 100ms, etc.) zu verwenden. - Eine übergeordnete Gesamtidee ist zu entwickeln, z.B. ein Computerspiel oder ein Sensor- / Aktorsystem
- Generell fällt es mir leichter eine gute Note zu geben, wenn mehr Funktionalität umgesetzt ist (als Hausnummer gelten 300 selbst entwickelte Codezeilen, pro Gruppenmitglied)
- Beachten Sie die Infos unter Tipps für Programmierung, insbesondere die Vorgaben für die Programmierung!
- Nutzen Sie die vorhandenen, seriellen Schnittstellen
Für die Vorträge finden Sie hier weitere Tipps
Projekte für 2er Gruppen
Filter
Im folgenden werden sehr hohe Filterordnungen gesucht. Diese werden z.B. dazu genutzt Unterabtastung durch einen Aliasingfilter zu vermeiden. Details dazu sollten im kommenden Semester in Messtechnik auf Sie zu kommen. Zur Filterauswahl können z.B. folgende Tools genutzt werden:
- WEBENCH Power Designer von Texas Instruments
- Analog Filter Wizard von Analog Devices
- weitere Tools sind erlaubt, sollten aber angegeben werden
| Nr | Gruppe | Filtertyp | Verstärkung im Durchlassbereich | Grenzfrequenz(en) | Filterordnung | Topologie | Weitere Randbedingungen (RB) |
|---|---|---|---|---|---|---|---|
| 1 | Tiefpass | $20~\rm dB$ | $2~\rm kHz$ | siehe RB | siehe RB | Frequenzen größer als 4kHz sollen weniger als $0,1~\rm \%$ in das Ausgangssignal eingehen, geringe Komponentenanzahl, Mexle-Hookup, Ausgangsfilter | |
| 2 | Hochpass | Faktor 3 | $100~\rm Hz$ | siehe RB | siehe RB | Akustikfilter: d.h. möglichst geringe Verzerrung und Vermeidung von Überschwingern, $<-23~\rm dB$ bei $40~\rm Hz$, Mexle-Hookup, Eingangsfilter auf ADC | |
| 3 | Hochpass | $10~\rm dB$ | $1~\rm kHz$ | siehe RB | siehe RB | Akustikfilter: d.h. möglichst geringe Verzerrung und Vermeidung von Überschwingern, $<-23~\rm dB$ bei $40~\rm Hz$, separates Mexle-Modul, Eingangsfilter auf ADC | |
| 4 | Bandpass | $40~\rm dB$ | $30~\rm kHz$, $50 ~\rm kHz$ | siehe RB | siehe RB | maximal flacher Verlauf im Durchlassbereich (ohne Welligkeit), Stoppband: bei $>120~\rm kHz$ weniger als $-20 ~\rm dB$ vom urspr. Signal, separates MEXLE Modul, Eingangsfilter auf ADC | |
| 5 | Bandpass | $20~\rm dB$ | $1~\rm kHz$, $5 ~\rm kHz$ | siehe RB | siehe RB | maximal flacher Verlauf im Durchlassbereich (ohne Welligkeit), Stoppband: $>6~\rm kHz$ weniger als $-20~\rm dB$, separates MEXLE Modul, Eingangsfilter auf ADC | |
| 6 | Bandsperre | $20~\rm dB$ | $4~\rm kHz$, $10 ~\rm kHz$ | siehe RB | siehe RB | Topologie für nicht isolierte Widerstände, kein Überschwingen erlaubt, bei $6~\rm kHz...7~\rm kHz$ soll das Ausgangssignal mindestens um $-20~\rm dB$ abgeschwächt sein, separates MEXLE Modul, Eingangsfilter auf ADC | |
| 7 | Bandsperre | $30~\rm dB$ | $4~\rm kHz$, $10 ~\rm kHz$ | siehe RB | siehe RB | Topologie für nicht isolierte Widerstände, kein Überschwingen erlaubt, bei $6~\rm kHz...7~\rm kHz$ soll das Ausgangssignal mindestens um $-10~\rm dB$ abgeschwächt sein, separates MEXLE Modul, Eingangsfilter auf ADC | |
| 8 | Allpass | - | siehe RB | siehe RB | siehe RB | Die Teilfrequenzen eines Signals bis zu $1~\rm kHz$ sollen um $2~\rm ms$ verschoben werden, Eingangsfilter auf ADC |
Allgemeine OPV Schaltungen
Im folgenden sind Projekte zu weiteren, nicht zwangsläufig filternde Operationsverstärkerschaltungen gegeben
| Nr | Gruppe | Schaltungstyp | Weitere Randbedingungen (RB) |
|---|---|---|---|
| 15 | Summenverstärker mit Offsetkorrektur mit Hilfe einer Spannungsreferenz | Es soll mittels $2,4~\rm V$ Zener-Diode und einen invertierenden Operationsverstärker eine positive und negative Referenzspannung erzeugt werden. Diese soll an einem Summenverstärkter eine Offsetkorrektur nach $+/-1~\rm V$ ermöglichen. Der Summenverstärker soll ein Signal von $+/-3,3~\rm V$ auf $+/- 2~\rm V$ verstärken.
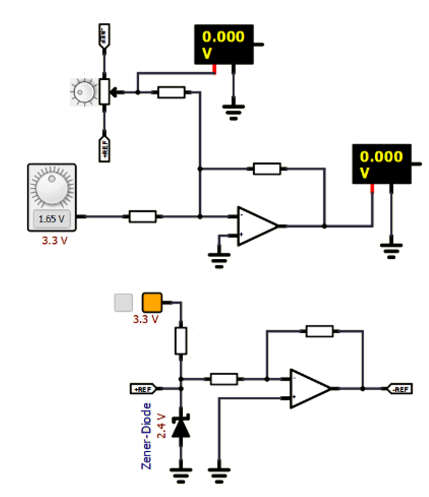 |
|
| 16 | Temperaturmessschaltung | Entwickeln Sie eine Temperaturmessschaltung mit einem PTC-Temperatursensor (z.B. KTY81). Die Temperatur soll mithilfe eines Operationsverstärkers in einen Spannungswert ($0$ – $\rm Vcc$) übersetzt werden, welcher dann durch einen ADC im Mikrocontroller eingelesen werden kann (Das Einlesen durch den ADC ist nicht Teil der Aufgabe). Zusätzlich soll bei Überschreiten einer Temperatur von $100~\rm °C$ am Sensor eine rote LED angesteuert werden. |
Projekte für 3er Gruppen
Diese Projekte erfordern etwas mehr eigenständigen Entwicklungsaufwand. Die Angaben sind ähnlich definiert wie diese in der Industrie erwartbar wären.
| Nr | Gruppe | Projekt | Weitere Randbedingungen |
|---|---|---|---|
| 20 | Zweistufiger Universalfilter | Ein Universalfilter ermöglicht es ein Signal gleichzeitig mit verschiedenen Filtern zu bearbeiten. In diesem Fall soll es möglich sein zwei Universalfilter hintereinander zu schalten. Einige der Widerstände sollen digital veränderbar sein, damit die Grenzfrequenzen verändert werden können. | |
| 21 | Auswertung Lithium-Ionen-Batterien | Entwickeln Sie für die Produktion von LiFePO4 Batterien eine Test-Elektronik, mit den Randbedingungen: 5V-Versorgung der Elektronik, Test sollte trotz Verpolung möglich sein, Batterie-SOC soll nach einem Datenblatt über die Quellspannung möglichst genau gemessen werden. | |
| 22 | Auswertung Kontaktwiderstand von Schaltern | Entwickeln Sie für die Dauerlauferprobung von Relais eine Auswertung des Kontaktwiderstands. Dazu soll eine Konstantstromquelle auf Basis eines Operationsverstärker benutzt werden, welche zwei unterschiedliche Ströme ermöglicht (2A, 0,02A). Zusätzlich soll eine Auswerteelektronik die vorhandene Spannungen auf 0..5V abbilden (Bereich des Kontaktwiderstands für Relais sind im Netz zu suchen). | |
| 23 | Auswertung von EEG, EKG Signalen | Bei EEG, EKG Signalen kommen geringe Spannungen mit niedrigen Frequenzen zusammen und erfordern eine besondere Elektronik. Entwickeln Sie einen Chopper-Verstärker, der solche Signale vorverarbeiten kann. | |
| 24 | PWM-Leistungsstufe für DC-Motoren | Ergänzend zum Dreieck-Rechteck-Generator soll eine Leistungsstufe aus dem ET1-Labor (V5) teilweise nachgebaut werden. Suchen sie sich dazu einen passenden FET anstelle des Darlingtontransistors heraus. Beachten sie hierbei die maximale Verlustleistung des Transistors. Fügen sie zur Kontrolle LEDs ein, die es erlauben die Funktion der Leistungsstufe zu überwachen. Suchen sie sich einen passenden Operationsverstärker, der schnell genug ist und einen ausreichend geringen Phasenrand hat, so dass die Schaltung bei $+/-3,3~\rm V$ funktioniert. Berechnen sie die Schaltung für eine Basisfrequenz von $20~\rm kHz$. Der DC-Motor hat eine maximale Leistungsaufnahme von $1 ~\rm W$ und wird über eine separate Klemme mit $12 ~\rm V$ versorgt.
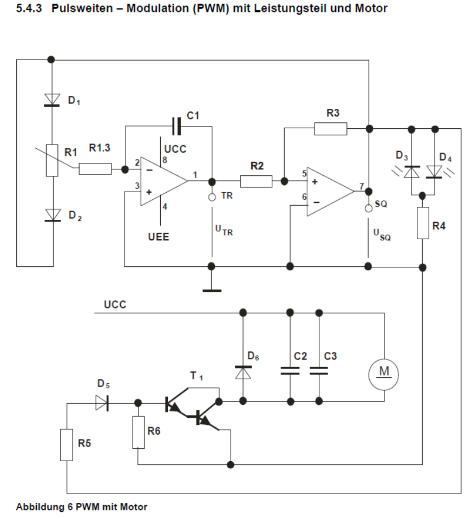 |
Ablauf der Präsentationen
Bitte lesen Sie zur Vorbereitung auf Ihren Vortrag die Tipps zu Präsentationen durch.
Die Präsentationen am 25.06 und 27.06 finden wie folgt statt:
