Dies ist eine alte Version des Dokuments!
3. Up-Down Counter
Tasten einlesen
Ziele
Nach dieser Lektion sollten Sie:
- wissen, wie eine Taste eingelesen werden kann
Video
Übung
- I. Vorarbeiten
-
- Laden Sie folgende Datei herunter:
- II. Analyse des fertigen Programms
-
- Initialisieren des Programms
- Öffnen Sie SimulIDE und öffnen Sie dort mittels
 die Datei
die Datei 3_logic_functions.simu - Laden Sie
3_logic_functions.hexals firmware auf den 328 Chip
- Betrachtung der neuen Komponenten: In der Simulation sind nun neben dem Microcontroller, der LED und dem Display Hd44780 zwei Schalter als neue Komponenten zu sehen, welche mit S1 und S2 bezeichnet sind. Diese werden in diesen Beispiel zur Eingabe genutzt.
- Betrachtung des Programmablaufs
- Zunächst wird eine Startanzeige mit dem Namen des Programms dargestellt.
- Als nächstes ist ein Displaybild zu sehen, in dem verschiedene logische Formeln mit Ergebnissen abgebildet sind:
- AND-Verknüpfung: $S1\&S2$,
- OR-Verknüpfung: $S1+S2$,
- NOT-Verknüpfung: $/S1$,
- XOR-Verknüpfung: $S1 xor S2$
- Werden die Tasten S1 und S2 gedrückt, so werden die Ergebnisse aktualisiert.
- Das Programm zu diesem Hexfile soll nun erstellt werden
- III. Eingabe in Atmel Studio
-
/*============================================================================= Experiment 3: Logische Basisfunktionen in Software ============= ==================================== Dateiname: Logic_Functions.c Autoren: Peter Blinzinger Prof. G. Gruhler (Hochschule Heilbronn) D. Chilachava (Georgische Technische Universitaet) Version: 1.2 vom 27.04.2020 Hardware: MEXLE2020 Ver. 1.0 oder höher AVR-USB-PROGI Ver. 2.0 Software: Entwicklungsumgebung: AtmelStudio 7.0 C-Compiler: AVR/GNU C Compiler 5.4.0 Funktion: Auf dem Display werden Ergebnisse von logischen Verknuepfungen (UND, ODER, NOT, XOR) dargestellt. Die logischen Eingangssignale werden von den Tasten S1 und S2 eingelesen. Displayanzeige: Start (fuer 2s): Betrieb: +----------------+ +----------------+ |- Experiment 3 -| |S1&S2=0 S1+S2=0| |Logic Functions | |/S1=1 S1xorS2=0| +----------------+ +----------------+ Tastenfunktion: S1 und S2 sind die Logikeingaenge. Betrieb ohne Entprellung Jumperstellung: keine Auswirkung Fuses im uC: CKDIV8: Aus (keine generelle Vorteilung des Takts) Header-Files: lcd_lib_de.h (Library zur Ansteuerung LCD-Display Ver. 1.3) =============================================================================*/ // Deklarationen ============================================================== // Festlegung der Quarzfrequenz #ifndef F_CPU // optional definieren #define F_CPU 12288000UL // MiniMEXLE mit 12,288 MHz Quarz #endif // Include von Header-Dateien #include <avr/io.h> // I/O Konfiguration (intern weitere Dateien) #include <util/delay.h> // Definition von Delays (Wartezeiten) #include <stdbool.h> // Bibliothek fuer Bit-Variable #include "lcd_lib_de.h" // Funktionsbibliothek zum LCD-Display // Konstanten #define NULL 0x30 // ASCII-Zeichen '0' #define EINS 0x31 // ASCII-Zeichen '1' // Variable bool sw1 = 0; // Bitspeicher fuer Taste 1 bool sw2 = 0; // Bitspeicher fuer Taste 2 // Makros #define SET_BIT(PORT, BIT) ((PORT) |= (1<<BIT)) // Einzelbit auf Port SET #define CLR_BIT(PORT, BIT) ((PORT) &= ~(1<<BIT)) // Einzelbit auf Port RESET // Funktionsprototypen void initDisplay(void); // Initialisierung Display und Startanzeige void initTaster(void); // Initialisierung der Taster void readButtons(void); // Einlesen der Tastenwerte // Hauptprogramm ============================================================== int main() // Start des Hauptprogramms { initDisplay(); // Initialisierung Display initTaster(); // Initialisierung der Buttons unsigned char temp; // temporaere Variable definieren while(1) // unendliche Schleife { readButtons(); // aktuelle Tastenwerte einlesen if (sw1&&sw2) temp=EINS; // Ergebnis der UND-Verknuepfung else temp=NULL; lcd_gotoxy(0,6); lcd_putc(temp); // auf LCD als Zeichen 0 oder 1 ausgeben if (sw1||sw2) temp=EINS; // Ergebnis der ODER-Verknuepfung else temp=NULL; lcd_gotoxy(0,15); lcd_putc(temp); // auf LCD als Zeichen 0 oder 1 ausgeben if (!sw1) temp=EINS; // Ergebnis der Negation else temp=NULL; lcd_gotoxy(1,4); lcd_putc(temp); // auf LCD als Zeichen 0 oder 1 ausgeben if (sw1^sw2) temp=EINS; // Ergebnis der XOR-Verknuepfung else temp=NULL; lcd_gotoxy(1,15); lcd_putc(temp); // auf LCD als Zeichen 0 oder 1 ausgeben _delay_ms(100); // Wartezeit 100 ms } // Ende der unendlichen Schleife } // Ende des Hauptprogramms // Funktionen ================================================================= // Initialisierung Display-Anzeige void initDisplay(void) { lcd_init(); // Initialisierungsroutine aus der lcd_lib lcd_gotoxy(0,0); // Cursor auf 1. Zeile, 1. Zeichen lcd_putstr("- Experiment 3 -"); // Ausgabe Festtext: 16 Zeichen lcd_gotoxy(1,0); // Cursor auf 2. Zeile, 1. Zeichen lcd_putstr("Logic Functions "); // Ausgabe Festtext: 16 Zeichen _delay_ms(2000); // Wartezeit 2 s lcd_gotoxy(0,0); // Cursor auf 1. Zeile, 1. Zeichen lcd_putstr("S1&S2=0 S1+S2=0"); // Ausgabe Festtext: 16 Zeichen lcd_gotoxy(1,0); // Cursor auf 2. Zeile, 1. Zeichen lcd_putstr("/S1=1 S1xorS2=0"); // Ausgabe Festtext: 16 Zeichen } // Initialisierung der Taster void initTaster(void) // Bitposition im Register: {// __76543210 DDRB = DDRB & 0b11111001; // Port B auf Eingabe schalten PORTB = 0b00000110; // Pullup-Rs eingeschaltet _delay_us(10); // Umschalten der Hardware-Signale abwarten } // Tastenwerte S1 und S2 (ohne Entprellen) einlesen void readButtons(void) { sw1 = !(PINB & (1 << PB1)); // Tasten invertiert in Bitspeicher einlesen sw2 = !(PINB & (1 << PB2)); // somit gedrueckte Taste ="1" }/*=============================================================================Ändern Sie auch hier wieder die Beschreibung am Anfang des C-Files, je nachdem was Sie entwickeln
Deklarationen ===================================- Hier wird wieder nach dem Quarz geprüft und ggf. dessen Frequenz eingestellt
- Bei den Header-Dateien wird nun die
stdbool.hDatei inkludiert. Über diese können die Funktionen der booleschen Algebra genutzt werden. - Als Konstanten werden
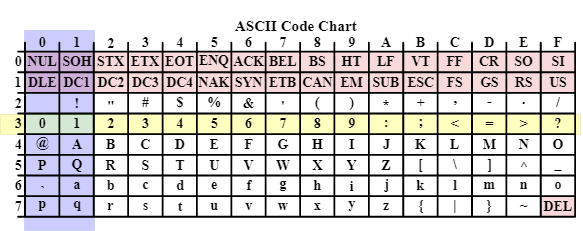
NULLundEINSdefiniert. Dieser hexadezimalen Zahlencode 0x30 und 0x31 entsprechen ausgebbare Zeichen nach dem ASCII Standard. Der ASCII Standard gibt für jedes darstellbare Zeichen einen Code vor. In Abbildung 1 ist die ASCII Tabelle gezeigt. Dort ist horizontal die erste Zahl (z.B. 0x30) und vertikal die zweite Zahl (0x30) aufgetragen. Diese führen zu den darstellbaren Zahlen '0' und '1'. - Die Variablen
sw1undsw2sollen im Folgenden den Zustand des Schalters anzeigen. - Die Makros wurden bereits erklärt
- Die Funktionsprototypen zeigen wieder die kommenden Unterprogramme an
Hauptprogramm =========================- Zunächst werden zwei Initialisierungsroutinen aufgerufen (siehe weiter unten)
- Dann wird eine temporäre Variable deklariert, welche im Folgenden die das ASCII-Zeichen der Ergebnisse enthält
- In der Endlosschleife wird zunächst die Unterfunktion
readButtons()aufgerufen (siehe weiter unten) - die Zeilen 84…102 scheinen sich sehr zu ähneln:
- Hier steht jeweils zuerst eine
if-Anweisung. In Abhängigkeit von der jeweiligen booleschen Funktion wird die temporäre Variable gleichNULL(also das Zeichen '0') oderEINS('1') gesetzt. - Die Funktion
lcd_gotoxy(0,6)versetzt wieder die Position am Display undlcd_putc(temp)gibt die temporäre Variable aus.
- Für die verschiedenen booleschen Funktionen steht jeweils eine
if-Anweisung bereit. Auch die Position am Display ist abhängig von der booleschen Funktion.
- In Zeile
104wird dann eine gewisse Zeit gewartet. Dies vermeidet das „Prellen“ des realen Schalters: In Realität wird bei Tastendruck nicht nur einmal der Kontakt geschlossen, sondern häufig mehrmals. Dies kann aber zu fehlerhaften Zuständen führen.
Funktionen =========================
- In
initDisplaywird wieder zunächst das Display initialisiert und die Startanzeige mit dem Namen des Programms angezeigt. Nach 2 Sekunden werden dann die booleschen Funktionen auf dem Display dargestellt. Dort sind die Ergebnisse für nicht gedrückte Schalter vorgegeben.
- Funktion
initTaster- Durch die Änderung des Datenrichtungs-Register (DDR) wird die Richtung der Anschlüsse vorgegeben. Diese beiden Anschlüsse sind in der Simulide Umgebung an die Schalter S1 und S2 angeschlossen. Durch die UND-Verknüpfung mit der Maske
0b11111001werden die Anschlüsse B0 und B3..B7 nicht geändert, sondern nur die Anschlüsse B1 und B2 auf Eingang gesetzt. - Mit der Zuweisung von
PORTBwurde bisher bei Ausgängen der Ausgabewert vorgegeben. Bei Eingängen wird über diese Zuweisung ein Pullup-Widerstand dazugeschalten. Damit ergibt sich aus dem äußeren Schalter und dem internen Widerstand ein Spannungsteiler. Bei leitfähigem Schalter gibt der Spannungsteiler $0V$ (=logisch $0$) zum Microcontroller aus, bei offenem Schalter $5V$ (=logisch $1$).
- Funktion
readButtonsliest aus dem RegisterPINBdas dem Schalter entsprechende Bit aus. Als Eselsbrücke:PINsteht für Input,PORTfür Output.
Funktion: Die Funktion des Programms sollte kurz erklärt werden. Damit wird dem Leser bereits vor dem Code schon Hinweise gegebenDisplay-Anzeige: Ähnlich der Funktion ist auch eine Darstellung der (erwartbaren) Anzeige sinnvoll.Tastenfunktion: Bei zukünftigen Anwendungen kann eine Eingabe von Tastenstellungen sinnvoll sein. Dies sollte hier angegeben werdenJumperstellungen: Jumper bieten die Möglichkeit unterschiedliche Schaltungsteile der Hardware zu verbinden oder zu trennen. Damit können Hardwarefunktionalitäten aktiviert oder deaktiviert werden. Wenn verschiedene Jumperstellungen für ein Programm wichtig sind, so sollten diese angegeben werden.Fuses im uC: Beim Microcontroller (auch μC oder uC abgekürzt) bieten die Möglichkeit interne Konfigurationen anzupassen. Diese werden über Fuses eingestellt werden. Sind hier Funktionen für das Programm notwendig, so sollten diese angegeben werdenHeader-Files: Werden weitere Softwareteile genutzt, so sollten diese über Header-Dateien eingebunden. Diese sollten bereits schon vor dem eigentlichen Codeteil kurz erklärt werden.
- Nach der Beschreibung steht im Code der Deklarationsbereich:
// Deklarationen ============================================================== // Festlegung der Quarzfrequenz #ifndef F_CPU // optional definieren #define F_CPU 12288000UL // MiniMEXLE mit 12,288 MHz Quarz #endif // Include von Header-Dateien #include <avr/io.h> // I/O Konfiguration (intern weitere Dateien) #include <util/delay.h> // Definition von Delays (Wartezeiten) #include "lcd_lib_de.h" // Funktionsbibliothek zum LCD-Display // Konstanten #define MIN_PER 59 // minimale Periodendauer in "Timerticks" #define MAX_PER 255 // maximale Periodendauer in "Timerticks" #define WAIT_TIME 2000 // Wartezeit zwischen Flanken in ms // Makros #define SET_BIT(PORT, BIT) ((PORT) |= (1 << (BIT))) // Port-Bit Setzen #define CLR_BIT(PORT, BIT) ((PORT) &= ~(1 << (BIT))) // Port-Bit Loeschen #define TGL_BIT(PORT, BIT) ((PORT) ^= (1 << (BIT))) // Port-Bit Toggeln // Funktionsprototypen void initDisplay(void); // Initialisierung Display und Startanzeige void initPorts(void); // Initialisierung der I/O-Ports void initTimer(void); // Timer 0 initialisieren (Soundgenerierung) void init(void); // generelle Initialisierungsfunktion
Bei den Deklarationen werden Vorgaben gemacht, welche wichtig sind, bevor der Code vor dem eigentlichen Prozessor oder Controller ausgeführt werden. Die Deklarationen weisen den Präprozessor an, bestimmte Vorgaben zu nutzen (Details zu Präprozessor und Compiler-Direktiven sind hier zu finden). Folgende Punkte sollten mindestens angegeben werden: Quarzfrequenz: Die Taktfrequenz des Microcontrollers kann entweder intern oder extern definiert werden. Diese Frequenz sollte immer angegeben werden. Wird dies nicht vorgenommen, kann es Probleme bei der Handhabung von Wartezeiten („Delays“) geben. In Simulide kann die Frequenz des externen Quarz eingegeben werden - diese sollte zum in der Software angegebenen Frequenz passen. Die Angabe#ifndefist hier eine Compiler-Direktive und keine C-Code. Wie alle anderen Deklarationen sind alle Zeilen nach der einem#vor der Ausführung des Codes im Controller zur Zeit der hexfile-Erstellung im Compiler wichtig.#ifndefprüft hierbei, ob ein Symbol bereits in einem anderen File definiert wurde.Header includes: Header-Dateien sollten bereits aus der Informatik 2 bekannt sein. Bei IDEs wird häufig zwischen Dateien unterschieden, welche in den Ordnern der IDE und Dateien, welche im Projektordner liegen. Hier sollen folgende Header-Dateien genutzt werden:<avr/io.h>: Header-Datei, welche Input/Output Bezeichner für Pins und Ports definiert. Da im Folgenden bestimmte Ports angesprochen werden sollen, ist diese Header-Datei wichtig. Die Header-Datei liegt im Unterordneravrin den Ordnern der IDE. Diese wurde bereits schon im Bespiel 1._hello_blinking_world verwendet.<util/delay.h>: Header-Datei, welche einen einfachen Umgang mit Wartezeiten ermöglicht. Diese wurde bereits schon im Bespiel 1._hello_blinking_world verwendet.„lcd_lib_de.h“: Diese Header-Datei sollte im Projektordner eingefügt sein. Bei einem neuen Projekt ist sie dies noch nicht.
To Do: notwendige header-Dateien
Bitte fügen Sie die Datei lcd_lib_de.h in den Projektordner ein
Dazu sollten Sie im Solution Explorer auf das Projekt rechts-klicken (hier2_Sound) » Add » Existing Item… (siehe Bild rechts).
Die gewünschte Datei (hier: die heruntergeladenelcd_lib_de.h) auswählen und mit Add hinzufügen. Die Datei sollte nun im Solution Explorer angezeigt werden.
#defines: Über#defineskann vorgegeben werden, welcher Text durch den Präprozessor im Code ersetzt werden soll. Damit können Konstanten oder kurze Codeersetzungen (Makros) vorgegeben werden. In diesem Programm soll ein maximale und minimale Periodendauer, sowie eine Haltedauer für den höchsten und niedrigsten Ton vorgegeben werden. Zusätzlich sind drei Standardmakros vorgegeben, um- ein Bit in einem Port zu setzen (
SET_BIT(PORT, BIT)), - ein Bit in einem Port zu löschen (
CLR_BIT(PORT, BIT)), oder - ein Bit in einem Port zu invertieren (
TGL_BIT(PORT, BIT)).
Funktionsprototypen: Wie regulär bei der C-Programmierung sollten die verwendeten Funktion dem Compiler bekanntgemacht werden.
- Als nächstes folgt das Hauptprogramm:
// Hauptprogramm ============================================================== int main() { init(); // Ports und Timer 0 initialisieren initDisplay(); // Display aktivieren while(1) // Start der unendlichen Schleife { for (OCR0A=MAX_PER; OCR0A>MIN_PER; OCR0A--) // Frequenz erhöhen { _delay_ms(10); // in Schritten von 10ms } _delay_ms(WAIT_TIME); // Wartezeit hohe Frequenz TGL_BIT(PORTB,DDB0); for (OCR0A=MIN_PER; OCR0A<MAX_PER; OCR0A++) // Frequenz absenken { _delay_ms(10); // in Schritten von 10 ms } _delay_ms(WAIT_TIME); // Wartezeit niedrige Frequenz TGL_BIT(PORTB,DDB0); } // Ende der unendlichen Schleife }Das Hauptprogramm besteht aus folgenden Teilen: - Initialisierungsteil: Zu Beginn werden einmalig-abzuarbeitende Programmteile ausgeführt. Darunter fällt insbesondere die Konfiguration der Hardware. Für die Ausgabe eines Signals muss das Direction-Register vorbereitet werden. Zusätzlich muss das Timer-Counter-Modul für die Ausgabe eines Wechselsignals (Pulsweiten-moduliertes Signal, PWM-Signal) vorbereitet werden. Diese wird über die Unterfunktionen
init()undinitDisplay()vorgenommen - Endlosschleife: damit ein Programm vom Microcontroller dauerhaft ausgeführt wird, muss dies in einer Schleife eingebunden sein. Diese wird durch das Konstrukt
while(1){…}vorgegeben. - In der Endlosschleife sind scheinen die Zeilen 77..82 und 84..89 ganz ähnlich auszusehen.
- Dort wird zunächst in einer for-Schleife das Register
OCR0Avon der maximalen PeriodendauerMAX_PERzur minimalenMIN_PERheruntergezählt und beim Zählschritt jeweils 10 Millisekunden gewartet (_delay_ms(10)). Wie im Video dargestellt, bietet es sich an für die Details zum Output Compare Register (OCR0A) en entsprechenden Teil des ATmega328-Datenblatts durchzulesen. Als leichten Einstieg kann auch die deutsche Übersetzung des ATmega88-Datenblatts per Index nachOCR0Adurchsucht werden. - Nachdem bis zur kürzesten Periode gezählt wurde, soll der höchste Ton die Dauer von
WAIT_TIMEMillisekunden gehalten werden. - Der Zustand der LED soll dann gewechselt werden.
- In den Zeilen 84..89 ist das gleiche für eine länger werdende Periodendauer eingefügt. Der einzige Unterschied besteht darin, das in der for-Schleife nun herauf statt herunter gezählt wird.
- Nach dem Hauptprogramm sind die Unterfunktionen aufgelistet:
// Funktionen ================================================================= // Generelle Initialisierungsfunktion void init() { initPorts(); // Ports auf Ausgang schalten initTimer(); // Timer zur Sounderzeugung starten } // Initialisierung der I/O-Ports void initPorts() { DDRB |= (1<<DDB0); // Port B, Pin 0 (zur LED) auf Ausgang DDRD |= (1<<DDD5); // Port D, Pin 5 (zum Buzzer) auf Ausgang } // Intialisierung des Timers 0 fuer Sounderzeugung void initTimer() { TCCR0A = (1<<WGM01) |(1<<COM0B0); // CTC Mode waehlen TCCR0B = (1<<CS01 | 1<<CS00); // Timer-Vorteiler /64 OCR0A = MAX_PER; // Start mit tiefstem Ton } void init(): Bei längeren Programmen bietet es sich an eine übergeordnete init-Funktion anzulegen, aus welcher die einzelnen Initialisierungen von Sensoren und ähnlichem aus aufgerufen werden.void initPorts(): In dieser Funktion werden die Data Direction Register der Ports B und D korrekt zugewiesen.void initTimer(): für das Timer Modul muss der gewünschte „Clear Timer on Compare“ Modus und Hardware-Vorteiler gewählt werden. Mit dem Teiler $r_{prescaler}=64$ ergibt sich für die Timer-Schritte pro Sekunde: $f_{Timer}= f_{Quarz} / r_{prescaler} = 12'288'000 Hz / 64 =192'000 Hz$. Da mitCOM0B0=0ein Invertieren des Ausgangs eingestellt wurde, wäre die höchste ausgegebene Frequenz $f_{out, max}= f_{Timer}/2 = 96'000 Hz$. Diese würde sich ergebe, wenn der Timer angewiesen würde nur einen Schritt zu zählen. Für eine Frequenz von $f_{out}= 1'600Hz$ muss $OCR0A=f_{out, max}/f_{out}-1=96'000Hz / 1'600Hz - 1= 59$ gesetzt werden. Dies entspricht geradeMIN_PER = 59.
- Ansprechen des Displays:
// Initialisierung der Display-Anzeige void initDisplay() // Start der Funktion { lcd_init(); // Initialisierungsroutine aus der lcd_lib lcd_gotoxy(0,0); // Cursor auf 1. Zeile, 1. Zeichen lcd_putstr("- Experiment 2 -"); // Ausgabe Festtext: 16 Zeichen lcd_gotoxy(1,0); // Cursor auf 2. Zeile, 1. Zeichen lcd_putstr(" Creating Sound "); // Ausgabe Festtext: 16 Zeichen } // Ende der FunktionIn der Funktionvoid initDisplaywird das Display angewiesen Daten auszugeben lcd_init(): Diese Unterfunktion sollte immer ausgeführt werden, bevor das Display angesprochen werden soll.lcd_gotoxy(x,y): Diese Funktion weist das Display an die kommende Ausgabe an der Position x,y auszugeben.lcd_putstr(string): Gibt einen vordefinierten Text an der aktuellen Position aus.

- IV. Ausführung in Simulide
-
- Geben Sie die oben dargestellten Codezeilen nacheinender ein und Kompilieren Sie den Code.
- Öffnen Sie Ihre hex-Datei in SimulIDE und testen Sie, ob diese die gleiche Ausgabe erzeugt
Sie sollten sich nach der Übung die ersten Kenntnisse mit dem Umgang der Umgebung angeeignet haben. Bitte arbeiten Sie folgende Aufgaben durch:
- Aufgaben
-
- Klicken Sie mit rechter Maustaste bei
main()aufWAIT_TIMEund dann auf Goto implementation. Sie werden feststellen, dass der Cursor auf die Deklaration des Wertes springt. Versuchen Sie selbiges beiinitDisplayanlcd_putstrund wählen Sie die Variante, welche ein{…}angefügt hat. Hier sehen Sie die den Code in der header-Datei, der für die Übergabe des Strings an das Display verantwortlich ist. Dort kann in gleicher Artlcd_putcundlcd_writeweiterverfolgt werden. Inlcd_writeundlcd_enablewird die Übergabe der Werte an das Display abgearbeitet. Dazu werden zunächst die Daten am Datenport ausgegeben und anschließend die Steuerleitung gepulst aktiviert.
Verfolgen Sielcd_gotoxynach. Wie wird das übertragen? - Wie ist es möglich bei aufsteigender und abfallender Frequenz einen entsprechenden Text am Display auszugeben? Ändern Sie den Code geeignet.
- Versuchen Sie das Programm so zu variieren, dass es ein Martinshorn ausgibt. Suchen Sie dazu zunächst die benötigten Frequenzen und ändern Sie das Programm passend ab.
- Können Sie eine kleine Melodie ausgeben? Versuchen Sie z.B. „Alle meine Entchen“, oder eine Melodie ihrer Wahl.